
미분기하학에서와 마찬가지로 대수기하학에서도 접공간은 다양체의 국소적 구조를 이해하는 핵심 도구이다.
접공간의 정의
미분기하학에서 우리는 \(M\) 위에 정의된 smooth function들의 sheaf \(\mathcal{C}^\infty_M\)에 대하여, 점 \(x\in M\)에서 vanish하는 모든 germ들의 모임
\[\mathfrak{m}_x=\{\mathbf{f}\in \mathcal{C}^\infty_x\mid \mathbf{f}(x)=0\}\]이 maximal ideal임을 확인하였다. 그 후 우리는 tangent space를
\[(\mathfrak{m}_x/\mathfrak{m}_x^2)^\ast\]로 볼 수 있다는 것을 증명하였다. ([미분다양체] §여접공간, ⁋보조정리 1) 이 과정은 보통 미분기하학에서는 잘 다루지 않으나, algebraic variety로의 일반화에 큰 도움을 준다. 즉, (편의상 affine case로 고정한다면) 우리는 이미 algebraic variety들 위에 정의된 함수가 무엇인지 알고 (§준사영다양체, ⁋정의 7), 이 때 \(x\in X\)에서 vanish하는 모든 함수들의 모임은 이 점에 해당되는 \(\mathbb{K}[X]\)의 maximal ideal에 해당한다는 것도 안다. 따라서 이를
\[\mathfrak{m}_x=\{f\in \mathbb{K}[X]\mid f(x)=0\}\]으로 정의하고, \(\mathbb{K}[X]\)의 이 maximal ideal에서의 localization \(\mathbb{K}[X]_{\mathfrak{m}_x}=\mathcal{O}_{X,x}\)을 생각할 수 있다. ([가환대수학] §국소화, ⁋정의 1) 기하적으로는 §아핀다양체, ⁋정의 14를 생각하면 이들은 점 \(x\)에서의 regular function들의 germ으로 정의할 수 있다.
정의 1 Variety \(X\)의 점 \(x\)에서의 Zariski tangent spaceZariski 접공간 \(T_x X\)를
\[T_x X = (\mathfrak{m}_x / \mathfrak{m}_x^2)^\ast\]으로 정의한다. 여기서 \(\mathfrak{m}_x\)는 점 \(x\)에서의 local ring \(\mathcal{O}_{X,x}\)의 유일한 maximal ideal이다.
결국 이 정의의 핵심은, quotient \(\mathfrak{m}_x / \mathfrak{m}_x^2\)는 \(x\)에서의 first-order infinitesimal data를 담고 있으므로 이를 Zariski cotangent space \(T_x^\ast X\)로 정의하겠다는 것이다. 그리고 dual인 \(T_x X\)는 이 data에 작용하는 linear functional들, 즉 방향미분연산자들의 공간이며, 이 정의는 \(T_xX=\Der_\mathbb{K}(\mathcal{O}_{X,x}, \mathbb{K})\)으로 정의하는 것과 맞아떨어진다.
우리는 해석학 스타일의 \(\epsilon\)-\(\delta\) 꼴의 미분을 사용하지는 않으나, 본질적으로 variety들은 다항식으로 정의되며 이들의 미분은 형식적으로 \(\x^n\)을 미분하면 \(n\cdot \x^{n-1}\)이 나오는 것으로 생각할 수 있다. 특히 affine variety의 경우 이는 더 명확하게 써 줄 수 있다.
명제 2 Affine variety \(X = Z(f_1, \ldots, f_k) \subseteq \mathbb{A}^n\)의 점 \(x = (x_1, \ldots, x_n)\)에서,
\[T_x X \cong \{v \in \mathbb{K}^n \mid (df_i)_x(v) = 0 \text{ for all } i\}\]이다. 여기서 \((df_i)_x\)는 \(f_i\)의 \(x\)에서의 differential로,
\[(df_i)_x(v) = \sum_{j=1}^n \frac{\partial f_i}{\partial \x_j}(x) v_j\]이다.
증명
\(X\)의 coordinate ring \(\mathbb{K}[X] = \mathbb{K}[\x_1, \ldots, \x_n] / (f_1, \ldots, f_k)\)를 생각하자. \(\mathfrak{m}_x = (\x_1 - a_1, \x_2 - a_2, \ldots, \x_n - a_n) / (f_1, \ldots, f_k)\)이므로,
\[\mathfrak{m}_x / \mathfrak{m}_x^2 \cong (\x_1 - a_1, \x_2 - a_2, \ldots, \x_n - a_n) / \left( (\x_1 - a_1, \x_2 - a_2, \ldots, \x_n - a_n)^2 + (f_1, \ldots, f_k) \right)\]이다. 각 \(f_i\)를 \(x\)에서 Taylor 전개하면
\[f_i = \sum_{j=1}^n \frac{\partial f_i}{\partial \x_j}(x) (\x_j - a_j) + \text{higher order terms}\]이고, higher order terms는 \((\x_1 - a_1, \x_2 - a_2, \ldots, \x_n - a_n)^2\)에 속한다. 따라서 \(\mathfrak{m}_x / \mathfrak{m}_x^2\)에서 \(f_i\)들의 linear part \(\sum_j \frac{\partial f_i}{\partial \x_j}(x) (\x_j - a_j)\)가 0이 된다.
한편, \(\mathfrak{m}_x / \mathfrak{m}_x^2\)는 \(\x_j - a_j\)들의 linear combination으로 생성되므로 \(\mathbb{K}^n\)의 quotient로 볼 수 있다. 이때 differential \((df_i)_x\)의 kernel이 정확히 \(\mathfrak{m}_x / \mathfrak{m}_x^2\)에서 사라지는 방향들에 해당한다. Dual을 취하면
\[T_x X = (\mathfrak{m}_x / \mathfrak{m}_x^2)^\ast \cong \{v \in \mathbb{K}^n \mid (df_i)_x(v) = 0 \text{ for all } i\}\]을 얻는다.
증명은 maximal ideal의 언어를 사용하며 복잡하게 쓰여졌지만, 그 철학은 \(X=Z(f_i)\)에 대해 생각해보면 간단하다. 이 경우 \((df_i)_x(v)=0\)은 (\(\mathbb{K}^n\)을 \(\mathbb{A}^n\)으로 본다면) 정확히 \(\mathbb{A}^n\) 안에서 초곡면 \(Z(f_i)\)의 (일상적인) 접공간이다. 명제 2은 그 자체만으로는 affine variety에 대해서만 적용되는 것이기는 하지만, 임의의 variety \(X\)의 임의의 점 \(x\)는 affine neighborhood를 가지므로 본질적으로는 모든 variety에 대해 적용되는 것이다. 접공간의 차원에 대한 다음 명제 또한 마찬가지다.
명제 3 \(T_x X\)는 \(\mathbb{K}\)-벡터공간이며, 그 차원은 \(n - \operatorname{rank}(J_x)\)이다. 여기서 \(J_x\)는 \(k \times n\) Jacobian matrix
\[J_x = \left(\frac{\partial f_i}{\partial \x_j}(x)\right)_{1 \le i \le k, 1 \le j \le n}\]이다.
증명
각 \((df_i)_x: \mathbb{K}^n \to \mathbb{K}\)는 linear functional이다. 명제 2에서 \(T_x X\)는 이들의 kernel들의 교집합이므로 \(\mathbb{K}^n\)의 부분공간이다. Jacobian matrix \(J_x\)의 행들은 이 linear functional들의 좌표표현이므로,
\[T_x X = \ker(J_x) = \{v \in \mathbb{K}^n \mid J_x v = 0\}\]이다. Rank-nullity theorem에 의해 \(\dim T_x X = n - \operatorname{rank}(J_x)\)이다.
매끄러운 점과 특이점
미분기하학에서, 임의의 점에서의 tangent space의 차원은 항상 manifold의 차원과 같았다. 그러나 이는 manifold의 정의가 다소 빡빡하기 때문으로, 대수기하학에서는 단 하나의 다항식으로 정의되는 affine variety마저 (고전적인 그림에서) manifold가 아닐 수 있다. (예시 6, 예시 7) 그럼에도 불구하고, tangent space의 차원과 variety의 차원이 아무런 관계가 없는 것은 아니다.
명제 4 Irreducible variety \(X\)의 임의의 점 \(x\)에 대해 \(\dim T_x X \ge \dim X\)이다.
증명
Affine case만 보인다. \(X = Z(f_1, \ldots, f_k) \subseteq \mathbb{A}^n\)이 irreducible하고 \(\dim X = d\)라 하자. 점 \(x \in X\)에서의 local ring \(\mathcal{O}_{X,x} = \mathbb{K}[X]_{\mathfrak{m}_x}\)를 생각하자. Localization은 차원을 보존하므로 \(\dim \mathcal{O}_{X,x} = \dim X = d\)이다. ([대수기하학] §차원, ⁋명제 2)
일반적으로 Noetherian local ring \((R, \mathfrak{m})\)에 대하여 \(\dim_{\mathbb{K}}(\mathfrak{m}/\mathfrak{m}^2) \ge \dim R\)이다. ([가환대수학] §매개계, ⁋명제 2) 따라서
\[\dim T_x X = \dim_{\mathbb{K}}(\mathfrak{m}_x/\mathfrak{m}_x^2) \ge \dim \mathcal{O}_{X,x} = d = \dim X\]이다.
우리의 직관을 키우기 위해서는 언제 부등식이 성립하는지를 살펴보는 것이 좋다. 이러한 점을 우리는 singular point라 부른다.
정의 5 점 \(x \in X\)가 smooth point매끄러운 점 (또는 nonsingular point)라는 것은 \(\dim T_x X = \dim X\)인 것이다. 그렇지 않으면 (즉, \(\dim T_x X > \dim X\)이면) singular point특이점이라 부른다.
예시 6 (Smooth points)
- \(\mathbb{A}^n\)의 모든 점은 smooth point이다. \(\mathbb{A}^n\)은 defining equation이 없으므로 \(T_x \mathbb{A}^n = \mathbb{K}^n\)이고, \(\dim T_x \mathbb{A}^n = n = \dim \mathbb{A}^n\)이다.
- Parabola \(Z(\y - \x^2)\)의 모든 점은 smooth point이다. \(f = \y - \x^2\)에 대해 \(J_{(x,y)} = (-2x, 1)\)이고, 이는 모든 점에서 nonzero이다. 따라서 \(\dim T_x X = 2 - 1 = 1 = \dim X\)이다.
예시 7 (Singular points)
-
(Node) \(X = Z(\y^2 - \x^2(\x+1)) \subset \mathbb{A}^2\)를 생각하자. 이 곡선은 원점에서 두 갈래로 갈라진다.
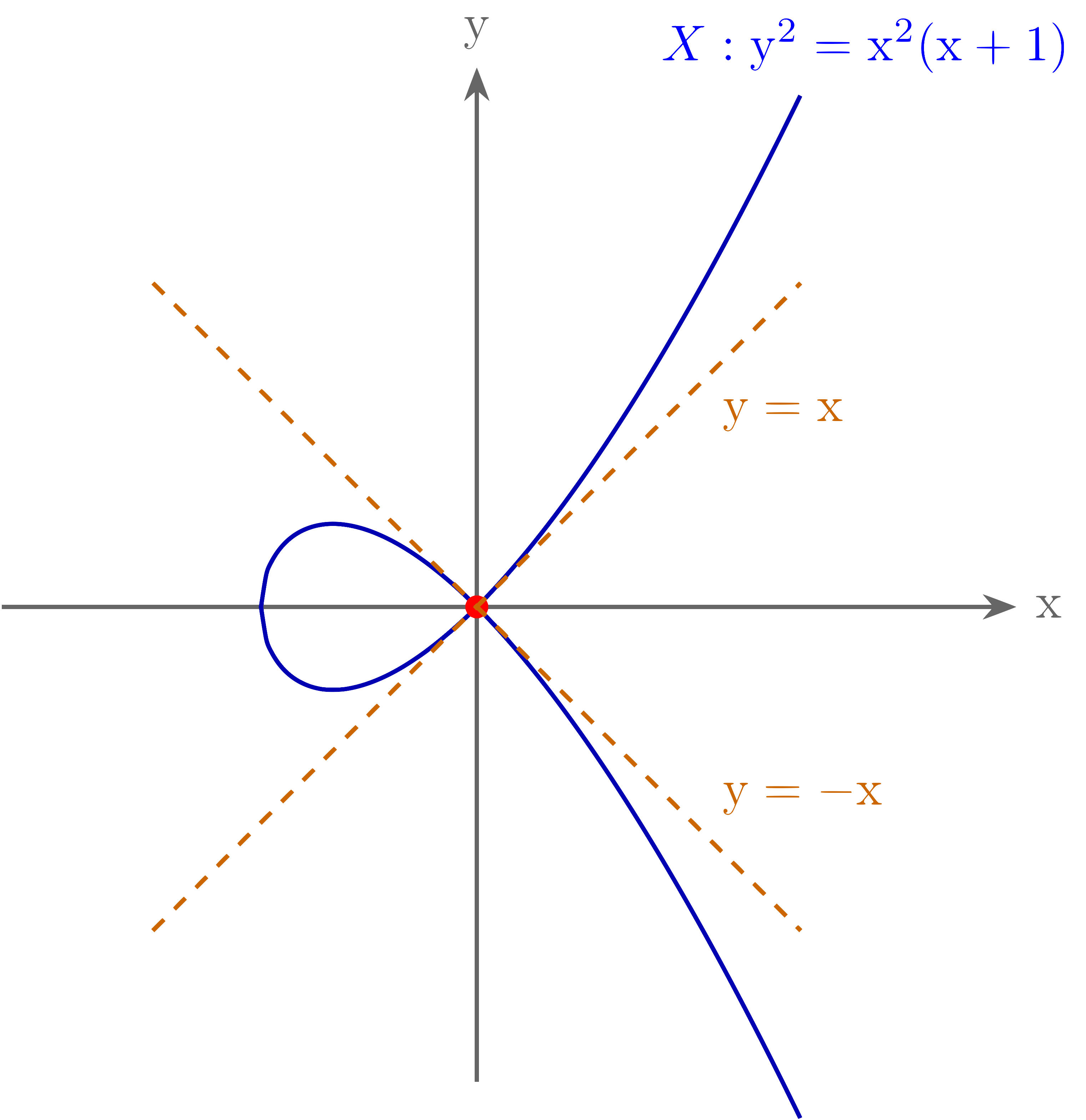
이 곡선의 Jacobian은
\[J_{(x,y)} = \begin{pmatrix} -2x - 3x^2 & 2y \end{pmatrix}\]이므로, 원점에서 Jacobian은 \((0,0)\)이고, 따라서 명제 3에 의해 원점은 singular point이다. 기하학적으로, 접공간이 2차원이라는 것은 두 갈래의 접선 방향이 모두 포함된다는 것을 의미한다. 구체적으로, \(\y^2 - \x^2(\x+1) \approx \y^2 - \x^2 = (\y-\x)(\y+\x)\)이므로, 원점 근처에서 곡선은 \(\y = \x\)와 \(\y = -\x\) 두 직선의 합집합처럼 보인다. Node는 “가장 온화한” 특이점 중 하나이다.
-
(Cusp) 이번에는 \(Z(\y^2 - \x^3)\subset \mathbb{A}^2\)를 생각하자.
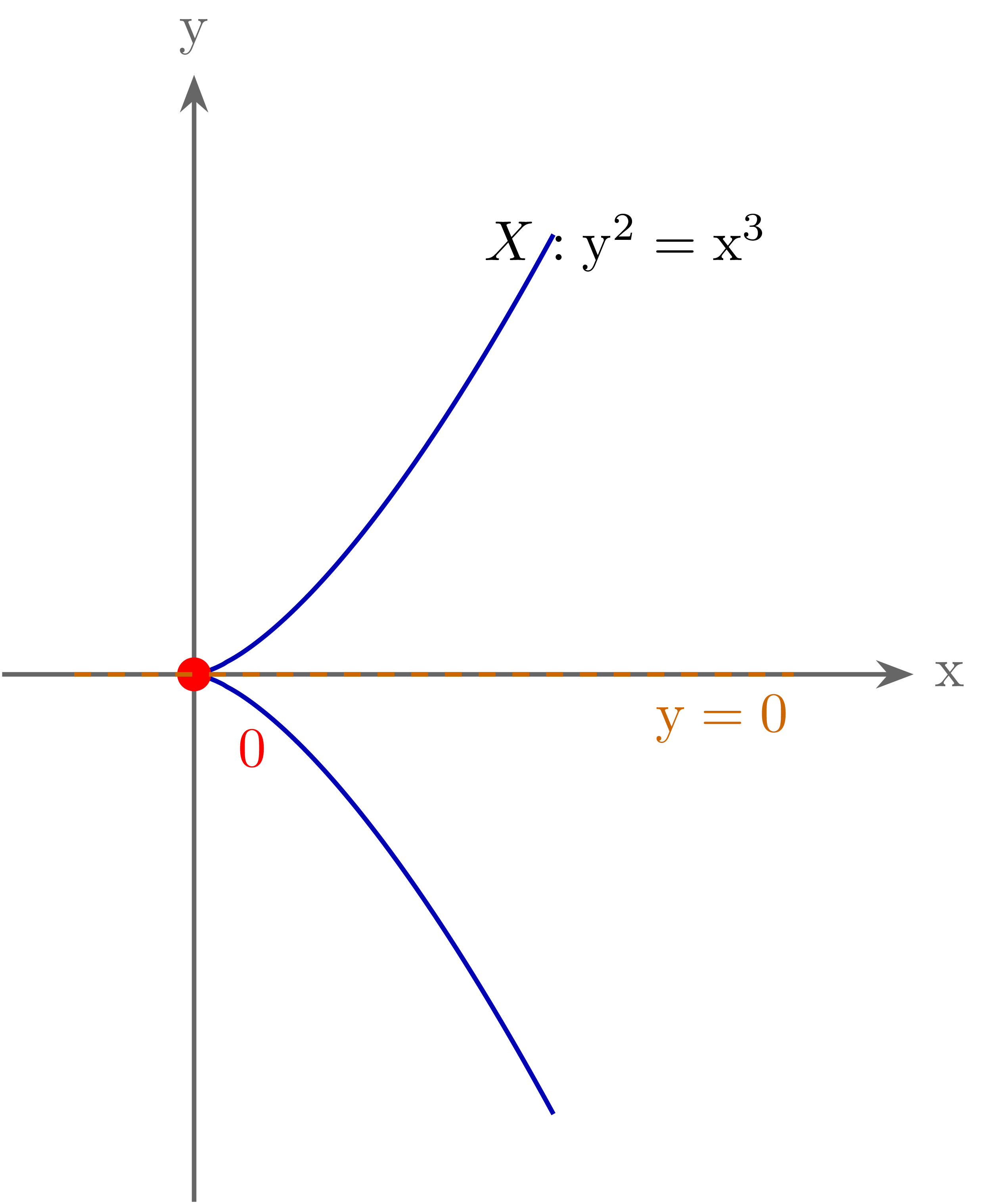
이 때, 이 곡선의 원점은 singular point이다. 이를 확인하기 위해 Jacobian을 계산하면,
\[J_{(x,y)}=\begin{pmatrix}-3x^2&2y\end{pmatrix}\]이므로 원점에서 \(\nabla f(0,0) = (0, 0)\)이다. 기하학적으로, 이 상황에서 접공간이 2차원이라는 것은 원점에서 모든 방향이 “접한다”는 것을 의미하며, 이는 곡선이 너무 뾰족해서 어떤 방향으로도 접선을 정의할 수 없음을 나타낸다.
위의 예시들에서 우리는 다음 명제를 자연스럽게 이용했다.
명제 8 (Jacobian Criterion) \(X = Z(f_1, \ldots, f_k) \subseteq \mathbb{A}^n\)이 irreducible하고 \(x \in X\)라 하자. 그럼 \(x\)가 smooth point일 필요충분조건은 Jacobian matrix \(J_x\)의 rank가 \(n - \dim X\)인 것이다.
증명
명제 2에서 \(\dim T_x X = n - \operatorname{rank}(J_x)\)임을 보였다. 정의 5에서 \(x\)가 smooth point라는 것은 \(\dim T_x X = \dim X\)인 것이다. 따라서 \(x\)가 smooth point일 필요충분조건은
\[n - \operatorname{rank}(J_x) = \dim X\]즉, \(\operatorname{rank}(J_x) = n - \dim X\)인 것이다.
매끄러운 점들의 존재
임의의 algebraic variety는 대부분의 점에서 매끄럽다. 이를 보이기 위해 generic point의 개념이 필요하다.
정의 9 Irreducible variety \(X\)의 generic point일반점 \(\eta\)는 \(X\)의 모든 nonempty open subset에 속하는 유일한 점이다.
Affine case \(X = \operatorname{Spec} A\)에서, \(\eta\)는 \(A\)의 minimal prime ideal (즉, \((0)\) ideal)에 해당하며, local ring \(\mathcal{O}_{X,\eta}\)는 정확히 function field \(\mathbb{K}(X) = \operatorname{Frac}(A)\)이다. 기하학적으로, generic point는 \(X\)의 “가장 일반적인 점”으로, \(X\)의 어떤 특정한 성질도 갖지 않는 점으로 생각하면 된다. 이러한 아이디어를 다음 증명에서 활용할 수 있다.
명제 10 Variety \(X\)의 smooth points들의 집합 \(X_\sm\)은 \(X\)의 dense open subset이다. 특히, \(X_\sm \ne \emptyset\)이다.
증명
\(X = Z(f_1, \ldots, f_k) \subseteq \mathbb{A}^n\)의 차원이 \(\dim X = d\)라 하자. 명제 8의 Jacobian criterion에 의해
\[X_\sm = \{x \in X \mid \operatorname{rank}(J_x) = n - d\}\]이다. 이제 이 집합이 dense open subset임을 보인다. 우선 \(X_\sm\)이 열린집합인 것은 상대적으로 자명하다. Rank가 정확히 \(n-d\)라는 것은 두 조건의 동시 성립을 의미한다. 첫째, rank가 \(n-d\) 이상이라는 것은, 어떤 \((n-d) \times (n-d)\) 부분행렬의 행렬식이 0이 아닌 것과 동치이고, 이는 Zariski 위상에서 열린조건이다. 둘째, rank가 \(n-d\) 이하라는 것은, 모든 \((n-d+1) \times (n-d+1)\) 부분행렬의 행렬식이 0인 것과 동치이고, 이는 닫힌조건이다. 따라서 rank가 정확히 \(n-d\)인 점들의 집합은 \(X\)의 열린집합이다.
\(X_\sm\)이 공집합을 아님을 보이는 것이 다소 기술적인데, 아이디어는 일반적인 점이 smooth point가 되어야 하므로, \(X\)의 generic point \(\eta\)를 생각하는 것이다. \(\eta\)에서의 localization을 생각하면, local ring \(\mathcal{O}_{X,\eta} = \mathbb{K}(X)\)는 field이므로 regular local ring이다. 그런데 [가환대수학] §매개계, ⁋명제 2에 의해
\[\dim_{\mathbb{K}}(\mathfrak{m}_\eta/\mathfrak{m}_\eta^2) \ge \dim \mathcal{O}_{X,\eta} = d\]인데, 명제 4에 의해 반대 부등식도 성립하므로 \(\dim T_\eta X = d\)이다. 따라서 \(\eta \in X_\sm\)이다. 이제 임의의 공집합이 아닌 열린집합은 irreducibility에 의해 dense이다.
그럼 다음을 정의한다.
정의 11 Variety \(X\)가 smooth (또는 nonsingular)라는 것은 모든 점이 smooth point인 것이다. 즉, \(X_\sm = X\)이다. 그렇지 않으면 (즉, singular point가 존재하면) singular라 부른다.
접원뿔
Singular point에서는 tangent space가 너무 커서 다양체의 국소적 구조를 정확히 반영하지 못한다. 이 경우 tangent cone이 더 정확한 정보를 제공한다. 직관적으로, tangent space가 너무 큰 것은 Jacobian의 rank가 너무 작은 것이고, 이는, 예를 들어, 주어진 함수의 일차근사만으로는 아무런 정보가 없기 때문에 일어난다. 따라서 만일 주어진 함수의 더 높은 차수의 근사를 생각한다면 상황이 달라질 수도 있을 것이다.
이를 위해, 임의의 다항식 \(f\in \mathbb{K}[\x_1,\ldots, \x_n]\)에 대하여 \(f\)의 initial term \(\initial(f)\)을 \(f\)의 homogeneous component 중 가장 작은 차수를 갖는 것으로 정의한다. 그럼 임의의 ideal \(\mathfrak{a}\)에 대하여, \(\mathfrak{a}\)의 initial ideal \(\initial(\mathfrak{a})\)를 \(\initial(f)\)들로 생성되는 homogeneous ideal으로 정의한다.
정의 13 임의의 affine variety \(X\subseteq \mathbb{A}^n\)에 대하여, \(\initial(I(X))\)이 정의하는 algebraic variety를 \(X\)의 원점에서의 tangent cone이라 정의한다.
더 일반적으로, \(f\)를 \(\x_i-x_i\)들에 대한 다항식으로 쓰고 비슷한 정의를 하면 임의의 점에서의 tangent cone을 정의할 수 있다. 이것이 cone이라 불리는 이유는, §사영다양체, ⁋정의 12와 마찬가지로 homogeneous ideal의 zero set이기 때문이다.
이제 이것이 어떻게 singular point를 더 세밀하게 분류하는지 살펴보자.
예시 14 예시 7의 nodal curve \(X = Z(\y^2 - \x^2(\x+1))\)에서, \(f\)의 lowest degree term은 \(\y^2 - \x^2 = (\y-\x)(\y+\x)\)이므로
\[TC_0 X = Z(\y-\x) \cup Z(\y+\x)\]이다. 이는 node가 두 직선 \(\y = \x\)와 \(\y = -\x\)의 방향으로 갈라짐을 정확히 보여준다.
예시 15 예시 7의 곡선 \(X = Z(\y^2 - \x^3)\)에서, \(f\)의 lowest degree term은 \(\y^2\)이므로
\[TC_0 X = Z(\y^2)\]이다. 이는 \(\y = 0\) 직선을 두 번 count한 것이며, cusp가 \(\x\)-축 방향으로 뾰족하게 끝남을 보여준다. 비교하면, tangent space \(T_0 X = \mathbb{K}^2\)는 모든 방향을 포함하여 너무 크다.
일반적으로, §유리사상, ⁋예시 12을 생각하면 nodal curve의 singularity는 blowup을 통해 해소할 수 있다. 즉 blowup을 하고 나면 원점에서 두 갈래 직선 \(\y-\x\)와 \(\y+\x\)는 \(\mathbb{P}^1\)에 의해 갈라지게 된다. 그러나 cusp은 그렇지 못하므로, 일반적으로 cusp이 node보다 좋지 않은 singularity로 생각한다.
참고문헌
[Har] J. Harris, Algebraic Geometry: A First Course, Springer, 1992. [Sha] I. R. Shafarevich, Basic Algebraic Geometry I: Varieties in Projective Space, Springer, 2013.
댓글남기기