
정의에 의하여, manifold \(M\)의 submanifold는 단사인 immersion을 의미한다. 이를 \(\Phi:P\rightarrow M\)으로 적자. 그럼 \(\Phi\)의 공역을 제한하여 얻어지는 함수 \(\bar{\Phi}:P\rightarrow \Phi(P)\)는 전단사함수이므로, \(P\)의 위상구조를 그대로 \(\Phi(P)\) 위에 옮겨올 수 있고, 이러한 과정을 통해 \(M\)의 submanifold는 부분집합의 inclusion \(\Phi(P)\hookrightarrow M\)으로도 생각할 수 있다. 이번 글에서 우리는 이를 조금 더 자세히 살펴본다.
부분다양체와 \(C^\infty\) 함수
우선 manifold \(M\)과, 그 submanifold \(\Phi:P\rightarrow M\)을 고정하자. 또 다른 \(C^\infty\) 함수 \(F:N\rightarrow M\)이 \(F(N)\subseteq\Phi(P)\)를 만족한다 하면, 위와 같이 정의된 \(\bar{\Phi}\)를 사용하여 새로운 단사함수 \(F_0:N\rightarrow P\)를 다음의 식
\[F_0=\bar{\Phi}^{-1}\circ F\]을 통해 정의할 수 있다. 자연스럽게 이렇게 정의된 함수 \(F_0\)이 immersion이 되는지를 물어볼 수 있다.
Submanifold를 단순히 원래의 manifold의 부분집합으로 본다면, 이 질문은 단순히 임의의 \(C^\infty\) 함수 \(F:N\rightarrow M\)의 치역이 \(F(N)\subseteq P\subseteq M\)을 만족할 때, \(F\)의 공역을 \(P\)로 제한한 것이 \(C^\infty\)냐는 질문과 같다. 그러나 이 질문은 보기보다 단순하지 않으며, 실제로 항상 이것이 성립하는 것은 아니다.
예시 1 두 manifold \(N,P\)가 모두 자연스러운 manifold 구조가 주어진 \(\mathbb{R}\)이라 하고, \(M=\mathbb{R}^2\)에도 자연스러운 manifold 구조가 주어졌다 하자. 두 submanifold \(\Phi:N\rightarrow M\)과 \(\Psi:P\rightarrow M\)을 다음의 두 그림

과

처럼 정의하자. 그럼 \(\Phi(N)=\Psi(P)\)이며, 따라서 \(N\)에서 \(P\)로의 전단사함수 \(\bar{\Psi}^{-1}\circ\Phi\)가 잘 정의된다.
이제 \(N\)에서 원점의 충분히 작은 열린근방 \(U\)를 생각하고, \(U\)의 \(\bar{\Psi}^{-1}\circ\Phi\)에 의한 image를 생각하면 \((\bar{\Psi}^{-1}\circ\Phi)(U)\)는 \(P\)에서 열린집합이 아니다.
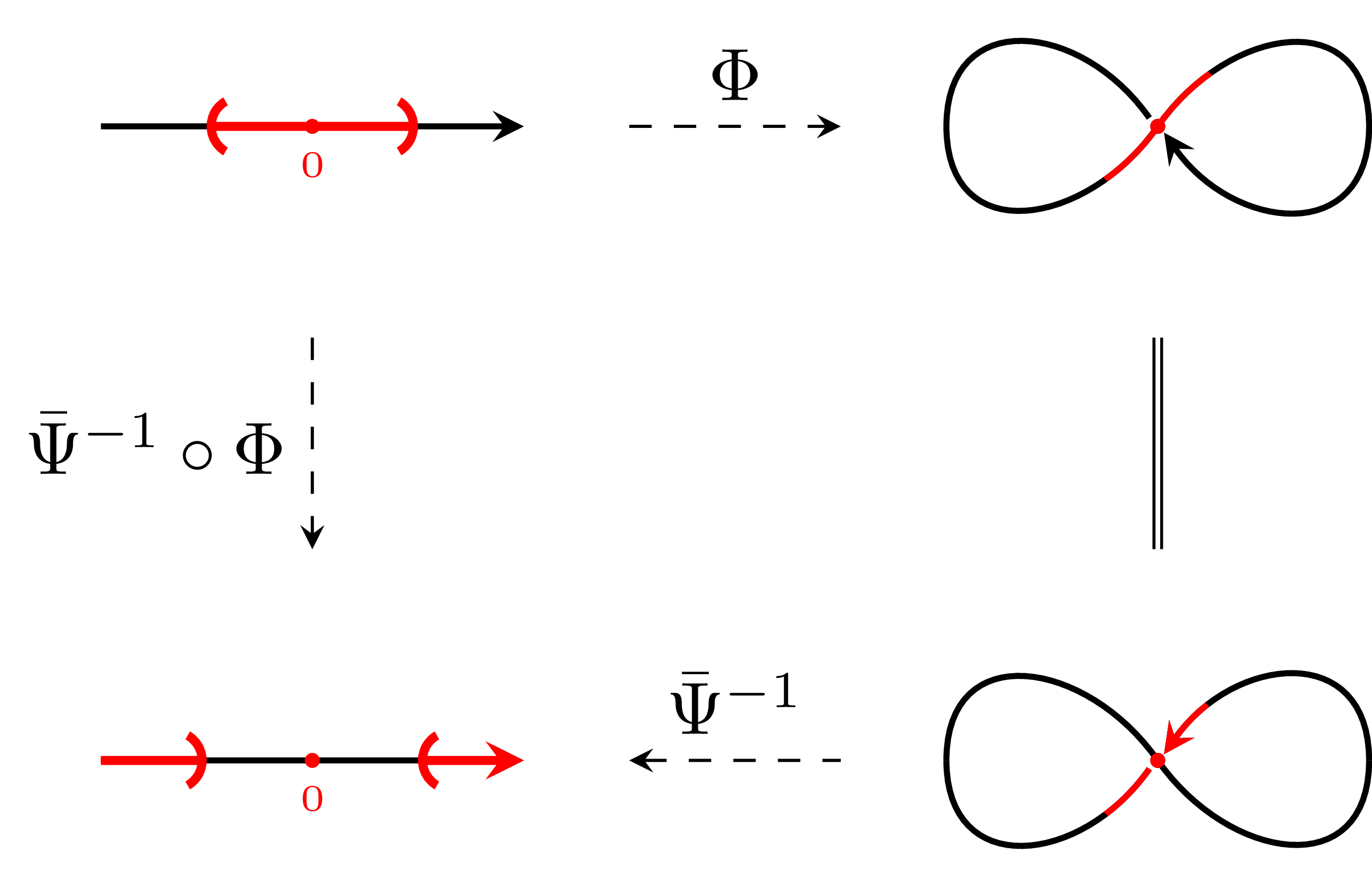
즉 \((\bar{\Psi}^{-1}\circ\Phi)^{-1}\)이 연속이 아니므로 이 함수는 \(C^\infty\) 함수조차 되지 않는다.
그러나, 다음 명제는 위의 예시와 같은 문제를 일으키는 것이 오직 위상적인 데이터라는 것을 보여준다.
명제 2 Manifold \(M\)의 submanifold \(\Phi:P\rightarrow M\)이 주어졌다 하자. 임의의 \(C^\infty\) 함수 \(F:N\rightarrow M\)가 \(F(N)\subseteq\Phi(P)\)를 만족한다면, 다음의 식
\[F_0=\bar{\Phi}^{-1}\circ F\]을 통해 정의되는 함수 \(F_0:N\rightarrow P\)에 대하여 다음이 성립한다.
- 만일 \(F_0\)가 연속이라면 \(F_0\)은 \(C^\infty\)이다.
- 만일 \(\Phi\)가 embedding이라면 \(F_0\)은 연속이다.
증명
둘째 주장은 정의이므로 첫 번째 주장만 보이면 충분하다.
\(F_0\)가 연속이라 가정하고, \(F_0\)이 \(C^\infty\)이기도 하다는 것을 보이자. 즉 임의의 \(x\in N\)에 대하여, \(x\)를 중심으로 하는 coordinate system \((U,\varphi)\)가 존재하여 \(F_0\)을 \(U\)로 제한한 것이 \(C^\infty\)임을 보여야 한다. 그런데 \(F_0\)가 연속인 전단사함수임을 가정하였으므로, 이를 보이기 위해서는 임의의 \(y\in P\)를 포함하는 coordinate system \((V,\psi)\)가 존재하여, \(\psi\circ F_0\)을
이제 \(y\in P\)가 임의로 주어졌다 하고, \(\Phi(y)\)를 포함하는 \(M\)의 coordinate system \((W,z^1,\ldots, z^m)\)를 택하자. 그럼 §부분다양체와 역함수 정리, ⁋따름정리 10으로부터 집합 \(\{z^k\circ\Phi\mid 1\leq k\leq m\}\)의 부분집합을 적당한 열린근방 \(V\)로 제한한 것이 점 \(y\in P\)의 coordinate system을 이룬다는 것을 안다.
이제 이들을 \(\{z^1\circ\Phi,\ldots,z^p\circ\Phi\}\)라 하자. 일반성을 잃지 않고, \(\gamma=(z^1,\ldots, z^m)\)이 \(\mathbb{R}^m\)으로의 전사함수라 하면, 위의 주장은 projection \(\pi:\mathbb{R}^m\rightarrow\mathbb{R}^p\)를 통해 \((V,\pi\circ\gamma\circ\Phi)\)가 \(y\)의 coordinate system이 된다는 것과 동일한 말이다. 이제
\[(\pi\circ\gamma\circ\Phi)\circ F_0|_{F_0^{-1}(V)}=\pi\circ\gamma\circ F|_{F_0^{-1}(V)}\]이고, 우변의 식은 \(C^\infty\) 함수들의 합성이므로 \(C^\infty\)이다.
부분다양체 사이의 동치관계
정의 3 Manifold \(M\)과 두 submanifold \(\Phi_1:N_1\rightarrow M\), \(\Phi_2:N_2\rightarrow M\)이 주어졌다 하자. 이들 둘이 equivalent하다는 것은 diffeomorphism \(\theta:N_1\rightarrow N_2\)가 존재하여 \(\Phi_1=\Phi_2\circ\theta\)가 성립하는 것이다.
이렇게 정의된 관계가 \(M\)의 모든 submanifold들 \((N,\Phi)\)들의 집합에 동치관계를 유도한다는 것은 자명하다. 임의의 equivalence class \([(N,\Phi)]\)를 택하자. 그럼 처음에 살펴본 것과 같은 쌍
\[A=\Phi(N)\subseteq M, \qquad \iota:A\hookrightarrow M\]을 생각할 수 있다. 이 때, \(A\)는 전단사함수 \(\bar{\Phi}:N\rightarrow A\)을 통해 \(N\)의 미분구조와 위상구조가 부여된 manifold이다. 그럼 \(\bar{\Phi}\)는 \(N\)과 \(A\) 사이의 diffeomorphism이므로, \(\bar{\Phi}^{-1}\) 또한 diffeomorphism이고 따라서 합성
\[\iota=\Phi\circ\bar{\Phi}^{-1}\]은 \(A\)에서 \(M\)으로의 immersion이다. 즉 \((A,\iota)\)는 \(M\)의 submanifold이다. 뿐만 아니라, 위의 식은 \((N,\Phi)\)와 \((A,\iota)\)가 equivalent하다는 것을 보여준다.
반대로, manifold 구조가 주어진 부분집합 \(A\subseteq M\)에 대하여 inclusion \(\iota:A\hookrightarrow M\)이 immersion이라 하면 \((A,\iota)\)는 항상 \(M\)의 submanifold가 된다. 이는 임의의 \(x\in A\)에 대하여 \(d\iota_x:T_xA\rightarrow T_xM\)이 단사함수임을 의미하므로, \(d\iota_x\)는 \(T_xA\)와 \(d\iota_x(T_xA)\) 사이의 전단사함수를 유도한다. 약간의 표기법 상의 문제를 덮어두면 \(T_xA\)를 \(d\iota_x(T_xA)\)와 동일한 것으로 취급할 수 있다.
부분다양체의 유일성
위의 절에서 정의한 \((A,\iota)\)는 equivalence class \([(N,\Phi)]\)마다
이 성립하므로 \(A\)는 유일하게 결정된다. 한편 이렇게 결정되는 \(M\)의 부분집합 \(A\)와 inclusion \(\iota:A\hookrightarrow M\)이 \([(N,\Phi)]\)에 속하기 위해서는 \(\iota=\Phi\circ\theta\)를 만족하는 diffeomorphism \(\theta\)가 존재해야 하는데, 양 변의 왼쪽에 \(\bar{\Phi}^{-1}\)을 취해주면 \(\theta=\bar{\Phi}^{-1}\)이므로 \(A\)의 manifold 구조는
반면 manifold \(M\)의 임의의 부분집합 \(\iota:A\hookrightarrow M\)에 대하여, \((A,\iota)\)를 submanifold로 만드는 \(A\)의 manifold 구조가 유일하게 존재하는 것은 아니다. 가령 예시 2와 같이 \(M\)의 두 submanifold \((N_1,\Phi_1),(N_2,\Phi_2)\)가 서로 diffeomorphic하지 않지만 \(\Phi_1(N_1)=\Phi_2(N_2)\)를 만족한다면, \([(N_1,\Phi_1)]\)과 \([(N_2,\Phi_2)]\)에서 위의 과정을 통해 얻어지는 \((A,\iota)\) 위의 두 manifold 구조는 서로 달라야 한다.
그럼에도 불구하고, \((A,\iota)\)가 만족해야 할 조건이 추가된다면 이 위에 submanifold의 구조가 유일하게 결정될 수도 있다. 다음 글에서 소개할 정리들의 결과는 이러한 유일성까지 만족하며, 이 때 다음의 두 명제를 유용하게 사용할 수 있다.
명제 4 Manifold \(M\)의 부분집합 \(A\)와, \(A\) 위에 정의된 topology \(\mathcal{T}\)를 고정하자. 그럼 \((A,\iota)\)를 \(M\)의 submanifold로 만드는 미분구조는 많아야 하나 존재한다.
증명
명제 2의 첫째 주장에 의해 자명하다.
명제 5 Manifold \(M\)의 부분집합 \(A\)가 주어졌다 하자. 만일 \(A\)를 \(M\)의 subspace로 보았을 때, \((A,\iota)\)를 \(M\)의 submanifold로 만드는 미분구조가 존재한다면, 이 미분구조와 subspace topology는 \((A,\iota)\)에 줄 수 있는 유일한 manifold의 구조가 된다.
증명
우선 앞선 명제 4를 subspace topology \(\mathcal{T}\)에 적용하면, \((A,\mathcal{T},\iota)\)를 \(M\)의 submanifold로 만드는 미분구조는 유일하다. 이를 \(\mathcal{A}\)라 하자. 이제 \((A,\iota)\)를 \(M\)의 submanifold로 만드는 위상 \(\mathcal{T}'\)와 미분구조 \(\mathcal{A}'\)가 주어졌다 하고, 다음 diagram을 생각하자.
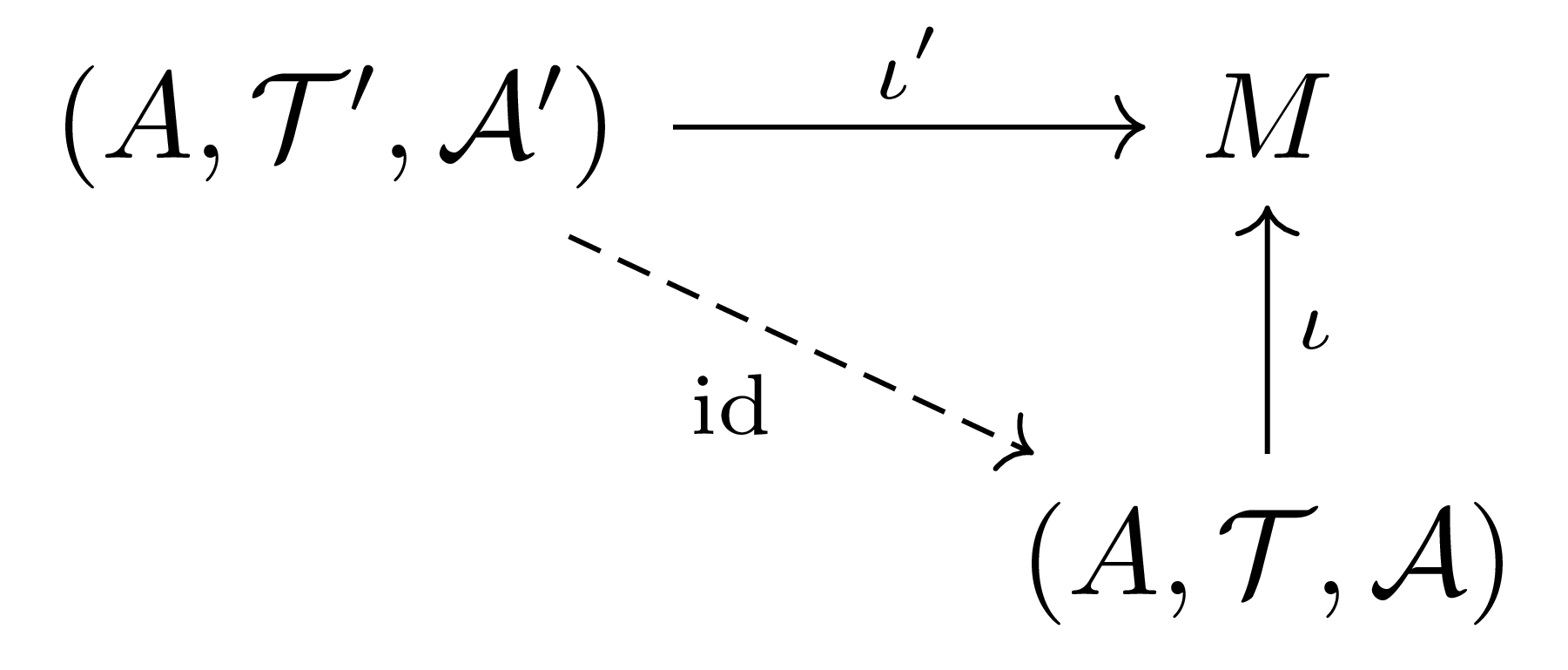
여기서 \(\iota\)와 \(\iota'\)는 모두 \(A\hookrightarrow M\)이지만, 구별을 위해 다른 이름으로 표기하였다. 정의에 의해 \((A,\mathcal{T},\mathcal{A})\)가 \(M\)의 embedded submanifold이므로, 수직방향의 \(\iota\)는 embedding이고 따라서 명제 2에 의하여 \(\operatorname{id}\)는 \(C^\infty\)이다. 또, 연쇄법칙에 의하여
\[d\iota'=d\iota\circ d(\id)\]이 성립하고, \(d\iota'\)는 모든 점에서 단사이므로 \(d(\id)\) 또한 모든 점에서 단사이다. 따라서 \(d(\id)\)가 모든 점에서 전사임을 보이면 충분하다.
결론에 반하여 \(d(\id)\)가 전사가 아닌 점 \(a\)가 존재한다 가정하자. 그럼 이 점에서의 tangent space의 차원을 생각하면
\[\dim(A,\mathcal{T}',\mathcal{A}')<\dim(A,\mathcal{T},\mathcal{A})\]이 성립한다. \((A,\mathcal{T},\mathcal{A})\)의 차원을 \(d\), \((A,\mathcal{T}',\mathcal{A}')\)의 차원을 \(d'\)라 하자.
\((U,\varphi)\)가 \((A,\mathcal{T},\mathcal{A})\)의 coordinate system이라 하자. 일반성을 잃지 않고 \(\varphi\)의 image가 \(\mathbb{R}^d\)라 가정할 수 있으며, 이 때 \(\id\)는 전사함수이므로 합성 \(\varphi\circ\id\)의 image 또한 \(\mathbb{R}^d\)이다.
한편, \((A,\mathcal{T}',\mathcal{A}')\)는 manifold이므로 이를 \(\mathbb{R}^{d'}\)와 homeomorphic한 countable한 coordinate system들 \((V,\sigma)\)들로 덮을 수 있다. 그런데 \(\varphi\circ\id\circ\sigma^{-1}\)은 \(C^\infty\)이고, 이들은 \(C^1\) 함수로서 모두 measure zero set \(\mathbb{R}^{d'}\)들을 measure zero set들로 보내므로 이들의 image가 \(\mathbb{R}^d\)가 되는 것은 모순이다.
참고문헌
[War] Frank W. Warner. Foundations of Differentiable Manifolds and Lie Groups, Graduate texts in mathematics, Springer, 2013
[Lee] John M. Lee. Introduction to Smooth Manifolds, Graduate texts in mathematics, Springer, 2012
댓글남기기