
우리는 앞서 manifold \(M\)의 tangent space \(T_pM\)을 정의하고, 이들의 차원이 원래의 manifold \(M\)과 동일하다는 것을 보이고, 또 \(T_pM\)의 자연스러운 basis 또한 정의했다. 이번 글에서 우리는 두 manifold 사이의 함수를 정의하고, 이것이 tangent space에서는 어떠한 방식으로 행동하는지를 살펴본다.
미분다양체 사이의 함수
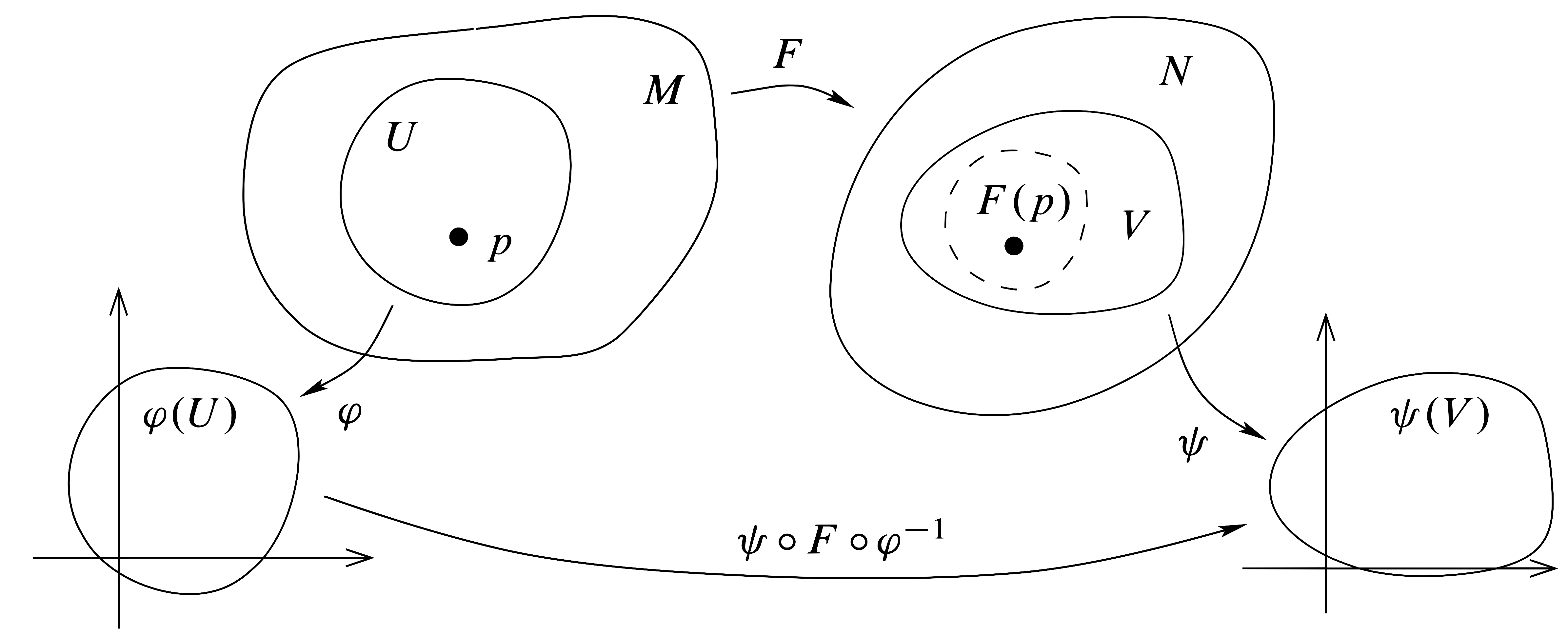
정의 1 두 manifold \(M,N\)이 주어졌다 하자. 함수 \(F:M\rightarrow N\)이 점 \(p\in M\)에서 \(C^\infty\)라는 것은, \(p\)를 포함하는 적당한 coordinate system \((U,\varphi)\)와, \(F(U)\subseteq V\)인 적당한 coordinate system \((V,\psi)\)가 존재하여 \(\psi\circ F\circ\varphi^{-1}\)이 \(C^\infty\)인 것이다.
만일 \(F\)가 모든 점에서 \(C^\infty\)라면 이를 간단히 \(C^\infty\) 함수라 한다.
앞서 manifold에서 \(\mathbb{R}\)로의 \(C^\infty\) 함수를 정의했을 때와 마찬가지로, 이 정의 또한 coordinate system의 선택과 무관하다는 것을 보여야 하지만 이는 기본적으로 §미분다양체, ⁋정의 2 이후에 증명한 것과 똑같기에 생략한다.
명제 2 두 manifold \(M,N\)이 주어졌다 하자. 만일 \(F:M\rightarrow N\)이 점 \(p\in M\)에서 \(C^\infty\)라면, 이 함수는 \(p\)에서 연속이다.
증명
정의 1의 상황을 그대로 가정하자. 그럼 우선 유클리드 공간 사이의 함수 \(\psi\circ F\circ\varphi^{-1}:\varphi(U)\rightarrow\psi(V)\)가 \(C^\infty\)이다. 이 함수는 미분가능하므로 당연히 연속이다. 그런데 \(\varphi\)와 \(\psi\)는 모두 homeomorphism이므로,
\[F=\psi^{-1}\circ(\psi\circ F\circ\varphi^{-1})\circ\varphi\]는 연속함수들의 합성이므로 연속이다.
예시 3 \(\id_M:M\rightarrow M\)은 당연하게 \(C^\infty\) 함수이다. 더 일반적으로, 임의의 열린집합 \(U\subseteq M\)에 open submanifold 구조를 주면 (§미분다양체의 예시들, ⁋정의 3) inclusion map \(U\hookrightarrow M\)은 \(C^\infty\) 함수이다.
예시 4 임의의 두 manifold \(M,N\)에 대하여, \(M\)의 임의의 점 \(p\in M\)을 모두 고정된 점 \(q\in N\)으로 보내는 상수함수는 \(C^\infty\)이다.
이제 우리가 다룰 대상들인 manifold들을 정의했고, manifold들 사이의 함수들을 정의했다. 다음 명제가 성립하는 것을 어렵지 않게 확인할 수 있다.
명제 5 세 manifold \(M,N,P\)에 대하여, 만일 \(F:M\rightarrow N\)과 \(G:N\rightarrow P\)가 모두 \(C^\infty\)라면 이들의 합성 \(G\circ F\) 또한 \(C^\infty\)이다.
그럼 manifold들 사이의 isomorphism은 다음과 같이 정의해야 한다는 것이 명확하다.
정의 6 만일 두 manifold \(M,N\)에 대하여, \(F:M\rightarrow N\)과 \(G:N\rightarrow M\)이 각각 존재하여 \(G\circ F=\id_M\)이고 \(F\circ G=\id_N\)이라면 \(F\)와 \(G\) 각각을 diffeomorphism미분동형사상이라 부르고, \(F\)와 \(G\)가 diffeomorphic미분동형이라 말한다.
따라서, manifold들과 smooth function들은 카테고리 \(\Man\)을 이룬다.
참고 동일한 topological manifold \(M\) 위에 diffeomorphic하지만 서로 같지는 않은 미분구조를 줄 수 있다. 두 미분구조 \(\mathcal{A}_1\), \(\mathcal{A}_2\)를 각각 single chart들 \((\mathbb{R},\id_\mathbb{R})\), \((\mathbb{R}, x\mapsto x^{3})\)을 통해 정의하자. 그럼 \(\mathcal{A}_1\)과 \(\mathcal{A}_2\)는 서로 다른 미분구조를 정의한다. (§미분다양체, ⁋예시 4)
편의상 \((M,\mathcal{A}_1)\)을 \(M_1\), \((M,\mathcal{A}_2)\)를 \(M_2\)로 이름붙이고, \(\varphi=\id_\mathbb{R}\), 그리고 \(\psi=(x\mapsto x^3)\)이라 하자.
이들 두 manifold \(M_1, M_2\)는 서로 diffeomorphic하다. \(M_1\)에서 \(M_2\)로의 함수 \(F\)를 \(x\mapsto x^{1/3}\)으로 정의하자. 그럼 자명하게 \(F^{-1}\)은 \(y\mapsto y^3\)으로 정의된다. 정의에 의해 \(F\)는 \(C^\infty\)이다. 임의의 점 \(p\in M_1\)에 대하여, \(M_1\)과 \(M_2\) 각각에 정의된 두 coordinate system \((\mathbb{R},\varphi)\)와 \((\mathbb{R},\psi)\)을 잡으면 \(p\in\mathbb{R}\), \(F(\mathbb{R})\subset\mathbb{R}\)을 만족하는 것은 자명하고, 또 이들이
\[(\psi\circ F\circ \varphi^{-1})(t)=t\]을 만족하므로 \(\psi\circ\varphi^{-1}\)이 \(C^\infty\)이기 때문이다.
뿐만 아니라 \(F^{-1}\) 또한 \(C^\infty\)가 되는데, 이는 마찬가지로 임의의 점 \(q\in M_2\)에 대해 위와 동일한 coordinate system을 잡으면 \(q\in\mathbb{R}\)이고 \(F^{-1}(\mathbb{R})\subset\mathbb{R}\)이 성립하며, 또
이 성립하기 때문이다.
미분사상
Manifold는 기본적으로 미분을 할 수 있는 공간이며, 때문에 manifold 사이의 함수를 알기 위해서는 이 함수가 미분들, 즉 tangent space의 원소들을 어떠한 방식으로 변환시키는지를 알아야 한다.
두 manifold 사이의 \(C^\infty\) 함수 \(F:M\rightarrow N\)이 주어졌다 하자. 함수 \(F\)는 자연스럽게 다음의 식
\[g\mapsto g\circ F\]으로 정의된 함수 \(F^\ast:\mathcal{C}_{N,F(p)}^\infty\rightarrow \mathcal{C}_{M,p}^\infty\)을 유도한다. 뿐만 아니라, 임의의 \(f,g,\in \mathcal{C}_{N,F(p)}^\infty\) 그리고 실수 \(\alpha\in\mathbb{R}\)에 대하여
\[F^\ast(f+g)=(f+g)\circ F=f\circ F+g\circ F=F^\ast(f)+F^\ast(g),\quad F^\ast(\alpha f)=(\alpha f)\circ F=\alpha(f\circ F)=\alpha F^\ast(f)\]가 성립하므로 \(F^\ast\)는 두 \(\mathbb{R}\)-벡터공간 사이의 linear map이다.
한편, \(T_pM\)과 \(T_{F(p)}N\)은 \(\mathcal{C}^\infty_{M,p}\)과 \(\mathcal{C}^\infty_{N,F(p)}\)에서 \(\mathbb{R}\)로의 linear map들 중 라이프니츠 법칙을 만족하는 원소들이므로, 이들은 각각의 dual space \((\mathcal{C}^\infty_{M,p})^\ast\)과 \((\mathcal{C}^\infty_{N,F(p)})^\ast\)의 부분공간이 된다. 따라서, 위에서 얻은 linear map \(F^\ast:\mathcal{C}^\infty_{N,F(p)}\rightarrow \mathcal{C}^\infty_{M,p}\)의 dual map \((F^\ast)^\ast:(\mathcal{C}^\infty_{M,p})^\ast\rightarrow(\mathcal{C}^\infty_{N,F(p)})^\ast\)를 생각할 수 있다.
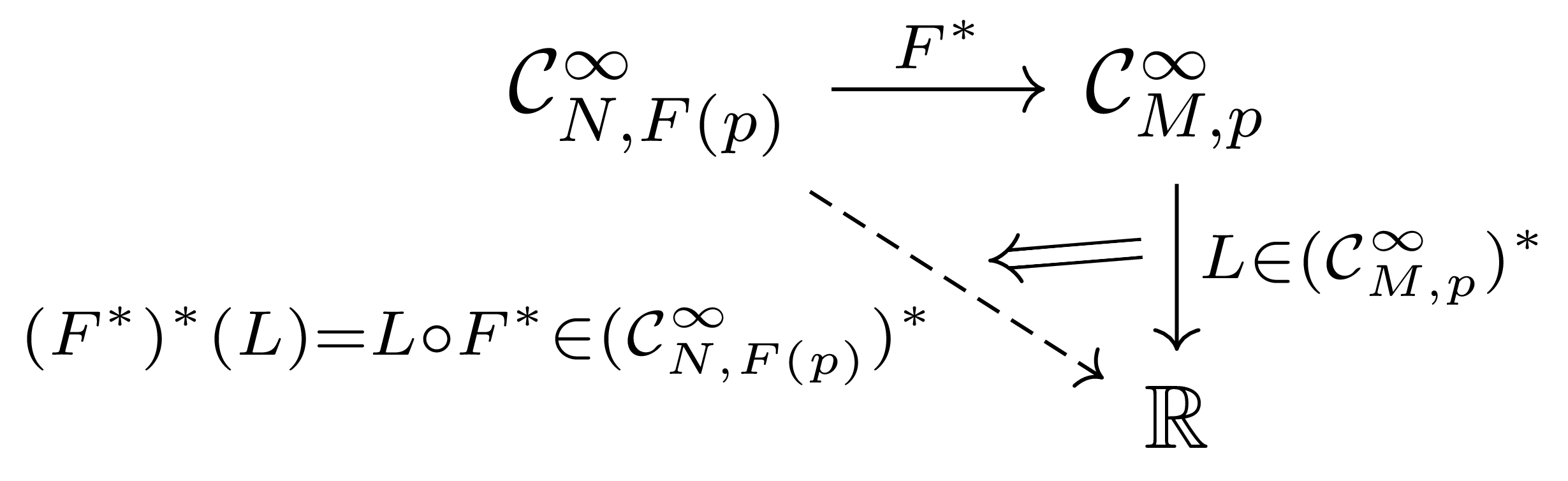
명시적으로, 이 함수는 임의의 linear map \(L\in (\mathcal{C}^\infty_{M,p})^\ast\)에 대하여
\[(F^\ast)^\ast(L)=L\circ F^\ast\]으로 정의되는 함수이다. 이제 이 정의를 \(T_pM\)으로 제한하면 원하는 정의를 얻는다.
그 전에 위의 논의를 벡터공간의 원소들의 입장에서 다시 정리하자면, \((F^\ast)^\ast\vert_{T_pM}\)는 임의의 \(v\in T_pM\)을 \(v\circ F^\ast\in (\mathcal{C}^\infty_{N,F(p)})^\ast\)으로 보낸다. 한편 \(v\circ F^\ast\)는 \((\mathcal{C}^\infty_{N,F(p)})^\ast\)의 원소이므로 임의의 \(g\in \mathcal{C}^\infty_{N,F(p)}\)에 어떻게 작용하는지를 통해 정의되는데, 이는
\[(v\circ F^\ast)(g)=v(F^\ast(g))=v(g\circ F)\]으로 정의된다. 뿐만 아니라, 이렇게 정의된 \(v\circ F^\ast\)는 실제로 \(T_{F(p)}N\)에 속한다. 즉, 라이프니츠 법칙을 만족한다. 이는 다음의 식
\[\begin{aligned}(v\circ F^\ast)(fg)&=v(F^\ast(fg))=v((f\circ F)(g\circ F))\\ &=(f\circ F)(p)v(g\circ F)+(g\circ F)(p) v(f\circ F)\\ &=f(F(p))(v\circ F^\ast)(g)+g(F(p))(v\circ F^\ast)(f)\end{aligned}\]으로부터 얻어진다. 지금까지의 논의를 정리하면 다음과 같다.
정의 7 \(F:M\rightarrow N\)이 두 manifold 사이의 \(C^\infty\) 함수라 하자. 임의의 \(p\in M\)에 대하여, \(F\)의 점 \(p\)에서의 differential미분사상 \(dF_p:T_pM\rightarrow T_{F(p)}N\)은 임의의 \(v\in T_pM\)과 임의의 \(g\in \mathcal{C}^\infty_{N,F(p)}\)에 대하여
\[(dF_p(v))g=v(g\circ F)\]으로 정의되는 linear map이다.
정의로부터 몇 가지 결과는 자명하다. 우선 \(\id_M:M\rightarrow M\)에 대하여 \(d(\id_M)_p\)는 항상 \(T_pM\)에서 \(T_pM\)으로의 identity인 \(\id_{T_pM}\)이 된다. 이는 정의 7의 식으로부터 명백하다. 또, 세 manifold \(M,N,P\)에 대하여 \(F:M\rightarrow N\), \(G:N\rightarrow P\)가 \(C^\infty\)라면, 다음의 식
\[d(G\circ F)_p=(dG_{F(p)})\circ (dF_p)\]이 성립한다. 이는 differential을 정의할 때 사용한 pullback이 합성을 잘 보존한다는 것으로부터도 자명하고, 혹은 마찬가지로 정의 7의 식에 \(G\circ F\)를 직접 대입해보아도 된다. 이로부터 diffeomorphism \(F\)에 대해 \(dF_p\)는 항상 벡터공간 사이의 isomorphism이 된다는 것 등을 보일 수 있다.
그러나 differential이 isomorphism이 되는 \(C^\infty\) 함수 중 diffeomorphism이 아닌 것은 매우 많다.
명제 8 Manifold \(M\)과, \(M\)의 open submanifold \(U\)에 대하여, inclusion map \(\iota:U\hookrightarrow M\)은 모든 \(p\in U\)에 대하여 tangent space 사이의 isomorphism을 유도한다. 즉, \(d\iota_p\)가 항상 isomorphism이다.
증명
\(\iota^\ast\)가 \(\mathcal{C}^\infty_{U,p}\)와 \(\mathcal{C}^\infty_{M,\iota(p)}\) 사이의 isomorphism을 만들기 때문에 자명하다. 사실 처음부터 두 벡터공간은 같은 것으로 보아도 무리가 없다.
접공간의 기저와 미분사상
\(\mathbb{R}^m\)을 \(m\)차원 manifold로 본다면, 우리가 tangent vector를 정의한 방식은 정확히 \(\mathbb{R}^m\)에서의 방향벡터와 동일하다는 것을 알 수 있다. 이 경우, 임의의 \(p\in\mathbb{R}^m\)에 대하여, 점 \(p\)를 시점으로 하는 \(\mathbb{R}^m\)의 표준적인 \(m\)개의 벡터들이 각자의 방향으로의 방향미분을 정의하며, 우리는 이들을
\[\frac{\partial}{\partial r^1}\bigg|_p,\cdots,\frac{\partial}{\partial r^m}\bigg|_p\]으로 적기로 하였다. 일반적인 manifold의 경우 우리는 \(p\in M\)을 포함하는 coordinate system \((U,\varphi)\)를 택한 후, \(\varphi\)의 성분함수 \(x^1,\ldots, x^m\)들을 이용하여 tangent vector들을
\[\frac{\partial}{\partial x^1}\bigg|_p,\cdots,\frac{\partial}{\partial x^m}\bigg|_p\]들로 표현하였다. 이 때, 임의의 \(f\in C^\infty_p(M)\)에 대하여
\[\frac{\partial}{\partial x^i}\bigg|_pf=\frac{\partial}{\partial r^i}\bigg|_p (f\circ\varphi^{-1})\]이다. 그런데 정의 7을 염두에 두고 이 식을 다시 살펴보면, 이는 \(\varphi^{-1}:\varphi(U)\rightarrow U\)의 differential과 동일한 모양임을 알 수 있다.1 즉 tangent space의 basis는 다른 것이 아니라, 단지 \(\mathbb{R}^m\)의 tangent space \(T_{\varphi(p)}\mathbb{R}^m\)의 \(m\)개의 basis들을 differential \(d\varphi^{-1}_{\varphi(p)}\)를 통해 옮겨온 것일 뿐이다.
이를 좀 더 선형대수학적인 관점에서 보자면, \(\mathcal{B}\)를 \(\mathbb{R}^m\)의 standard basis, \(\mathcal{C}\)를 \(\partial/\partial x^i\)들로 이루어진 \(T_pM\)의 basis라 하면 \((T_{\varphi(p)}\mathbb{R}^n, \mathcal{B})\)에서 \((T_pM, \mathcal{C})\)로의 linear map \(d\varphi^{-1}_{\varphi(p)}\)의 행렬표현이 정확히 항등행렬이 된다고 할 수 있다.
더 일반적으로, \(M,N\)이 각각 \(m,n\)차원의 manifold이고 \(F:M\rightarrow N\)이 임의의 \(C^\infty\) 함수라 하자. 그럼 고정된 \(p\in M\)에 대하여, \(p\)를 포함하는 coordinate system \((U,\varphi)\), 그리고 \(F(U)\)를 포함하는 coordinate system \((V,\psi)\)가 존재하여 \(\psi\circ F\circ\varphi^{-1}\)이 \(C^\infty\)이다. 이제 \(\varphi=(x^i)_{i=1}^{m}\), \(\psi=(y^j)_{j=1}^n\)이라 하자. 그럼 마찬가지로 tangent space \(T_pM\), \(T_{F(p)}N\)의 basis는 각각
\[\frac{\partial}{\partial x^1}\bigg|_p,\cdots,\frac{\partial}{\partial x^m}\bigg|_p,\quad\text{and}\quad\frac{\partial}{\partial y^1}\bigg|_{F(p)},\cdots\frac{\partial}{\partial y^n}\bigg|_{F(p)}\]으로 주어진다. 이제 이들을 통해 \(dF_p\)를 행렬로 나타내보자. 이를 위해서는 각각의 \(\partial/\partial x^i\)들이 \(dF_p\)를 통해 옮겨지는 벡터를 \(\partial/\partial y^j\)들의 일차결합으로 표현하면 된다. 즉
\[dF_p\left(\frac{\partial}{\partial x^i}\bigg|_p\right)=a_{1i}\frac{\partial}{\partial y^1}\bigg|_{F(p)}+\cdots+a_{ni}\frac{\partial}{\partial y^n}\bigg|_{F(p)}\]의 각 계수들 \(a_{ji}\)를 구해주면 된다. 그런데 어차피 \(\partial/\partial y^j\)들은 \(\mathfrak{n}/\mathfrak{n}^2\)의 원소들 \(y^j+\mathfrak{n}^2\)의 dual basis이므로, 이를 위해서는 양 변을 함수 \(y^j\)에 적용해주면 된다.2 즉
\[dF_p\left(\frac{\partial}{\partial x^i}\bigg|_p\right)y^j=a_{1i}\frac{\partial}{\partial y^1}\bigg|_{F(p)}y^j+\cdots+a_{ji}\frac{\partial}{\partial y^j}\bigg|_{F(p)}y^j+\cdots+a_{ni}\frac{\partial}{\partial y^n}\bigg|_{F(p)}y^j\]에서, dual basis의 정의에 의해 우변은 오직 \(a_{ji}\)만 남게 되므로
\[dF_p\left(\frac{\partial}{\partial x^i}\bigg|_p\right)y^j=a_{ji}\]이고 이로부터 \(dF_p\)의 두 basis \(\partial/\partial x^i\), \(\partial/\partial y^j\)들에 대한 행렬표현이 다음의 행렬
\[\begin{pmatrix}\partial(y^1\circ F)/\partial x^1&\partial(y^1\circ F)/\partial x^2&\cdots&\partial(y^1\circ F)/\partial x^m\\\partial(y^2\circ F)/\partial x^1&\partial(y^2\circ F)/\partial x^2&\cdots&\partial(y^2\circ F)/\partial x^m\\\vdots&\vdots&\ddots&\vdots\\\partial(y^n\circ F)/\partial x^1&\partial(y^n\circ F)/\partial x^2&\cdots&\partial(y^n\circ F)/\partial x^m\end{pmatrix}\]인 것을 알 수 있다. 즉, 이는 단지 유클리드 공간 사이의 함수 \(\psi\circ F\circ\varphi^{-1}\)의 Jacobian에 불과하다.
특별히 \(M=N\)이고 \(F=\id_M\)이지만 서로 다른 coordinate system \((U, \varphi)\)와 \((V,\psi)\)를 택한 경우, 이는 transition map \(\psi\circ\varphi^{-1}\)의 Jacobian matrix가 될 것이다.
참고문헌
[War] Frank W. Warner. Foundations of Differentiable Manifolds and Lie Groups, Graduate texts in mathematics, Springer, 2013
[Lee] John M. Lee. Introduction to Smooth Manifolds, Graduate texts in mathematics, Springer, 2012
댓글남기기