
함수의 방향미분과 리 미분
Manifold \(M\) 위에서 정의된 함수 \(f\)를 생각하자. 정의에 의하여 점 \(p\in M\)에서 \(v\in T_pM\) 방향으로의 \(f\)의 방향미분은 \(v(f)\)와 같다. 우리가 \(M\) 위에서
을 사용하지 못하는 가장 큰 이유는 \(p+tv\)가 정의되지 않기 때문이다. 그러나 만일 \(M\) 위에 적당한 \(C^\infty\) 곡선 \(\gamma\)가 주어졌다고 하고, \(\gamma(0)=p\), \(\gamma'(0)=v\)라 한다면 다음 식
\[\lim_{h\rightarrow 0}\frac{f(\gamma(h))-f(p)}{h}\tag{1}\]을 통해 방향미분의 값을 구해낼 수 있다는 것을 알고 있다. (§미분사상의 예시들, ⁋정의 1)
이제 \(M\) 위에 벡터장 \(X\)가 주어졌다 하고, 각 점 \(p\)에서 \(X_p\) 방향으로의 방향미분 \(X_pf\)를 구하는 문제를 생각해보자. 이는 기하학적으로는 위와 같이 모든 점 \(p\)마다 \(\gamma(0)=p\), \(\gamma'(0)=X_p\)를 만족하는 곡선 \(\gamma_p\)를 잡아 위의 식 (1)을 적용하는 것과 같다. 그런데 우리는 이러한 성질을 만족하는 곡선이 반드시 존재한다는 것을 알고 있다. (§벡터장, ⁋정리 6)
정의 1 Manifold \(M\)과 그 위에 정의된 벡터장 \(X\)를 고정하고, 함수 \(f:M\rightarrow\mathbb{R}\)이 주어졌다 하자. 그럼 \(f\)의 Lie derivative리 미분 \(\mathcal{L}_Xf\)는 다음의 식
\[(\mathcal{L}_Xf)(p)=\lim_{t\rightarrow 0}\frac{f(\phi^t(p))-f(\phi^0(p))}{t}=\lim_{t\rightarrow 0}\frac{f(\phi^t(p))-f(p)}{t}\]으로 정의되는 함수이다.
물론 앞선 논증에 의해 이는 방향미분 \(X_pf\)와 다를 것이 없다. 그러나 여기에서 사용한 \(\phi^t\)는 단순히 함수가 아니라, \(M\) 위에 정의된 다른 모든 것들을 미분하는 방식을 제공해준다.
벡터장의 리 미분
가장 간단한 예시는 벡터장의 미분이다. 벡터장 \(Y\)는 \(M\)에서 \(TM\)으로의 함수이므로, 위의 정의 1과 유사한 방법을 사용하여 미분을 시도해볼 수 있으나 이는 만만한 일이 아니다. 여기에는 함수의 미분보다 조금 더 근본적인 문제가 있는데, \(Y(\phi^t(p))\)는 \(T_{\phi^t(p)}\)의 원소인 반면 \(Y(p)\)는 \(T_pM\)의 원소이므로 이들 둘의 차 \(Y_{\phi^t(p)}-Y_p\)를 계산하는 방법이 애초부터 없기 때문이다.
그럼에도 불구하고 우리 상황에서는 이를 미분하는 것이 가능하다. §벡터장, ⁋정리 6을 생각하면 \(\phi^t\)는 diffeomorphism이므로, \(d\phi^t\)는 \(T_pM\)에서 \(T_{\phi^t(p)}\)으로의 isomorphism을 유도한다. 또, 같은 정리에서 이 isomorphism의 역함수는 \(d\phi^{-t}\)라는 것 또한 안다. 따라서 \(Y_{\phi^t(p)}\)를 \(d\phi^{-t}\)를 통해 \(T_pM\)으로 가져오면 다음과 같이 정의할 수 있다.
정의 2 Manifold \(M\)과 그 위에 정의된 벡터장 \(X\)를 고정하고, 또 다른 벡터장 \(Y:M\rightarrow TM\)이 주어졌다 하자. 그럼 \(Y\)의 Lie derivative \(\mathcal{L}_XY\)는 다음의 식
\[(\mathcal{L}_XY)_p=\lim_{t\rightarrow 0}\frac{(d\phi^{-t})_{\phi^t(p)}(Y_{\phi^t(p)})-Y_p}{t}\]으로 정의된 벡터장이다.
미분형식의 리 미분
물론 이와 같은 방식으로 계속 정의해나갈 수 있다. 예를 들어 다음은 미분형식을 벡터장 \(X\)에 대해 미분하는 방법이다.
정의 3 Manifold \(M\)과 그 위에 정의된 벡터장 \(X\)를 고정하고, differential form \(\omega\in\Omega^\ast(M)\)이 주어졌다 하자. 그럼 \(\omega\)의 Lie derivative \(\mathcal{L}_X\omega\)는 다음의 식
\[(\mathcal{L}_X\omega)_p=\frac{d}{dt}\bigg|_{t=0}(\phi^t)^\ast\omega_{\phi^t(p)}=\lim_{t\rightarrow 0}\frac{(\phi^t)^\ast\omega_{\phi^t(p)}-\omega_p}{t}\]으로 정의된 differential form이다.
뿐만 아니라, 어렵지 않게 임의의 tensor field로도 이 정의를 확장할 수 있다. 이는 우리가 당장 사용할 내용은 아니므로 넘기기로 한다.
다음 명제의 일부는 이미 증명하였던 것이고, 일부는 새로운 것이지만 증명을 모두 적기에는 길기 때문에 생략한다.
명제 4 임의의 \(X\in\mathfrak{X}(M)\)에 대해 다음이 성립한다.
- 임의의 \(f\in C^\infty(M)\)에 대하여 \(\mathcal{L}_Xf=X(f)\).
- 임의의 \(Y\in \mathfrak{X}(M)\)에 대하여 \(\mathcal{L}_XY=[X,Y]\).
- \(\mathcal{L}_X\)는 \(\Omega^\ast(M)\)에서 \(\Omega^\ast(M)\)으로의 derivation이며, \(d\)와 commute한다.
- \(\mathcal{L}_X=\iota_X\circ d+d\circ\iota_X\).
-
임의의 \(\omega\in\Omega^k(M)\)과 \(X_0, X_1,\ldots, X_k\in\mathfrak{X}(M)\)에 대하여
\[\mathcal{L}_{X_0}(\omega(X_1,\ldots, X_k))=(\mathcal{L}_{X_0}\omega)(X_1,\ldots, X_k)+\sum_{i=1}^k\omega(X_1,\ldots, X_{i-1}, \mathcal{L}_{X_0}X_i,X_{i+1},\ldots, X_k)\] -
임의의 \(\omega\in\Omega^k(M)\)과 \(X_0, X_1,\ldots, X_k\in\mathfrak{X}(M)\)에 대하여
\[\begin{aligned}d\omega(X_0,\ldots, X_k)&=\sum_{i=0}^k(-1)^iX_i\omega(X_0,\ldots, \hat{X}_i,\ldots, X_k)\\&\phantom{==}+\sum_{i<j}(-1)^{i+j}\omega([X_i, X_j], X_0,\ldots, \hat{X}_i,\ldots, \hat{X}_j,\ldots, X_k)\end{aligned}\]
5번과 6번에서, hat은 주어진 성분이 생략되었음을 의미한다.
이 명제의 첫 번째 결과는 우리가 이미 확인한 내용이다. 두 번재 결과와 여섯 번째 결과에서 나오는 \([-,-]\)는 Lie bracket이라 불리는 벡터장들 사이의 연산인데, 이에 대한 내용은 이번 글에서는 간략하게만 다루고 자세한 내용은 다음 글에서 다룬다. 어쨌든 둘째, 다섯째, 여섯째 결과의 핵심은 \(\mathcal{L}_X\)를 계산할 때, 원래의 정의를 따르는 대신 상대적으로 간단한 대수적인 계산만을 통해 Lie derivative를 구할 수 있다는 것이다. 네 번째 결과는 Cartan’s formula라는 이름으로 알려져 있다.
Lie Bracket
\(\mathfrak{X}(M)\)은 일반적인 설정에서 \(C^\infty(M)\)-algebra가 되지는 않는다. \((XY)(fg)\)를 직접 계산해보면,
\[(XY)(fg)=X(f(Yg)+g(Yf))=(Xf)(Yg)+f(XY)g+(Xg)(Yf)+g(XY)f\tag{2}\]이 된다는 것을 확인할 수 있다. 바꾸어 말하자면 \(XY\)가 라이프니츠 법칙을 만족하지 못하도록 하는 것은 두 개의 항 \((Xf)(Yg)\)와 \((Xg)(Yf)\)이며, 따라서 다음을 정의한다.
정의 5 \(X,Y\in\mathfrak{X}(M)\)에 대하여, \([X,Y]\in\mathfrak{X}(M)\)은 다음의 식
\[[X,Y]f=X(Yf)-Y(Xf)\]으로 정의되는 원소이다.
물론 이 정의가 말이 되기 위해서는 우변의 식이 실제로 \(\mathfrak{X}(M)\)의 원소가 된다는 것을 확인해야 하지만, 이는 위에서 계산한 식 (2)에서 \(X\)와 \(Y\)의 정의를 바꾸어 \((YX)(fg)\)를 얻은 후, 이를 빼면 된다. 애초부터 이 정의는 문제가 되는 두 항을 소거하기 위한 정의였으므로 당연히 라이프니츠 법칙이 성립할 것이다.
이렇게 정의된 벡터장 \([X,Y]\)를 \(X\)와 \(Y\)의 Lie bracket이라 부른다. 이 정의는 나중에 아주 중요하게 쓰이므로, 몇 가지 결과를 미리 정리해 두는 것이 좋아보인다.
두 manifold \(M,N\) 사이의 \(C^\infty\) 함수 \(F:M\rightarrow N\)이 주어졌다 하자. 그럼 \(dF_p:T_pM\rightarrow T_{F(p)}N\)은 \(M\)의 한 점 \(p\)에서 정의된 tangent vector \(v\)를 \(N\)의 한 점 \(F(p)\)에서 정의된 tangent vector \(dF_p(v)\)로 보내주는 함수이다. 그러나 일반적으로 이것이 벡터장에 대해 가능할 필요는 없다. 즉, \(M\) 위에서 정의된 벡터장 \(X\)가 주어져 있다 하여, 이를 \(dF_p\) 등을 통해 \(N\) 위에서 정의된 벡터장을 만들 수 없다.
예컨대 \(F\)가 전사가 아니라면, \(F\)의 image에 속하지 않는 점 \(q\in N\)에서의 tangent vector를 대응시키는 방법이 자연스럽게 존재하지 않는다. 이는 치역을 제한하는 등의 방식으로 해결한다 치더라도, 만일 \(F\)가 단사가 아니고 \(F(p_1)=F(p_2)=q\in N\)라면, 이 공통의 점 \(q\)에서의 tangent vector를 \(dF_{p_1} v_1\)과 \(dF_{p_2} v_2\) 중 어떤 것을 택해야 할지도 정해야 한다.
때문에 \(X\in\mathfrak{X}(M)\)을 \(F\)를 통해 움직이려 하기보다는 이미 주어진 \(Y\in\mathfrak{X}(N)\)이 원하는 성질을 만족하는 경우를 살펴보는 편이 현명하다.
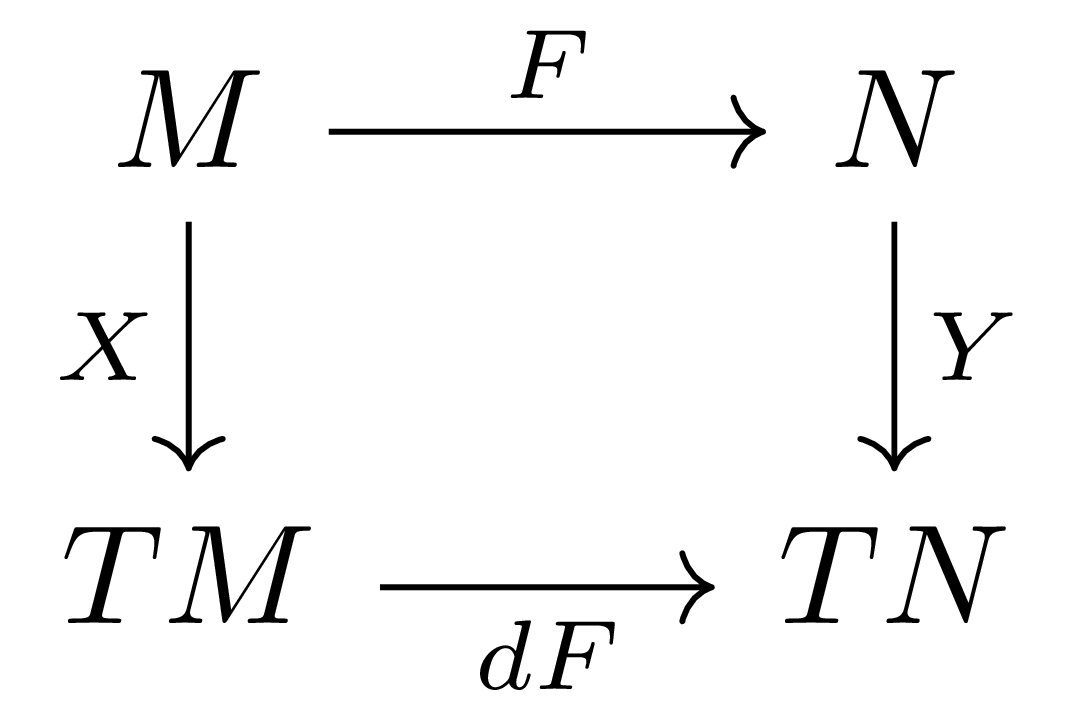
정의 6 \(F:M\rightarrow N\)이 \(C^\infty\) 함수라 하자. 만일 \(X\in\mathfrak{X}(M)\)과 \(Y\in\mathfrak{X}(N)\)이 다음의 식
\[dF_p(X_p)=Y_{F(p)}\]을 모든 \(p\in M\)에 대해 만족한다면, \(X\)와 \(Y\)가 \(F\)-related되어있다고 부른다.
즉, \(X\)와 \(Y\)가 \(F\)-related라는 것은 다음의 diagram이 commute한다는 것이다.
명제 2에서 \(X\)가 \(C^\infty\)임을 각각의 함수 \(f\)에 적용해보아 알 수 있듯, \(X\)와 \(Y\)가 \(F\)-related인지의 여부 또한 마찬가지로 각각의 함수에 적용하여 알아낼 수 있다.
명제 7 \(F:M\rightarrow N\)이 \(C^\infty\) 함수라 하고, \(X\in\mathfrak{X}(M)\), \(Y\in\mathfrak{X}(N)\)이라 하자. 그럼 \(X,Y\)가 \(F\)-related인 것은 임의의 \(f\)에 대하여, 다음의 식
\[X(f\circ F)=(Yf)\circ F\]이 성립하는 것과 동치이다.
증명
임의의 점 \(p\in M\)에 대하여,
\[X(f\circ F)(p)=X_p(f\circ F)=dF_p(X_p)f\]그리고
\[((Yf)\circ F)(p)=(Yf)(F(p))=Y_{F(p)}f\]이다. 따라서 주어진 두 조건이 동치이다.
처음 우리는 \(F\)가 전사도, 단사도 아니라면 \(F\)를 통해 \(X\in\mathfrak{X}(M)\)과 \(F\)-related인 \(Y\in\mathfrak{X}(N)\)을 찾는 것이 자연스럽지 않다는 것을 지적했었는데, \(F\)가 diffeomorphism이라면 다음과 같이 자연스러운 선택이 존재한다.
명제 8 \(F:M\rightarrow N\)이 diffeomorphism이라면, 임의의 \(X\in\mathfrak{X}(M)\)마다 유일한 \(Y\in\mathfrak{X}(N)\)이 존재하여 \(X,Y\)가 \(F\)-related이도록 할 수 있다.
증명
각각의 \(q\in N\)마다 유일한 \(p\in M\)이 존재하여 \(F(p)=q\)이다. 따라서 각각의 점 \(q\in N\)마다, \(Y\)를 다음의 식
\[Y_q=dF_p(X_p)\qquad (F(p)=q)\]으로 정의해주면 된다. \(Y\)가 \(X\)에 \(F\)-related이기 위해서는 위의 식이 반드시 성립해야 하므로, 이러한 \(Y\)가 유일하다는 것은 자명하다. 또, \(Y:N\rightarrow TN\)은 이제 다음 \(C^\infty\) 함수들의 합성
\[N\overset{F^{-1}}{\longrightarrow}M\overset{X}{\longrightarrow}TM\overset{dF}{\longrightarrow}TN\]이므로 \(Y\)는 \(C^\infty\)이다.
명제 9 \(F:M\rightarrow N\)이 \(C^\infty\)라 하자. 만일 \(i=1,2\)에 대해 \(X_i\in\mathfrak{X}(M)\), \(Y_i\in\mathfrak{X}(N)\)이고 \(X_i\)와 \(Y_i\)가 \(F\)-related라면 \([X_1,X_2]\)는 \([Y_1,Y_2]\)와 \(F\)-related이다.
증명
다음의 식
\[dF_p([X_1,X_2]_p)=[Y_1,Y_2]_{F(p)}\]이 모든 \(p\)에 대해 성립함을 보여야 한다. 이제 \(F(p)\) 근방에서 정의된 임의의 함수 \(f\)에 대하여,
\[\begin{aligned}dF_p([X_1,X_2]_p)f&=[X_1,X_2]_p(f\circ F)\\ &=(X_1)_p(X_2(f\circ F))-(X_2)_p(X_1(f\circ F))\\ &=(X_1)_p((Y_2f)\circ F)-(X_2)_p((Y_1f)\circ F)\\ &=dF_p(X_1)_p(Y_2f)-dF_p(X_2)_p(Y_1f)\\ &=(Y_1)_{F(p)}(Y_2f)-(Y_2)_{F(p)}(Y_1f)\\ &=[Y_1,Y_2]_{F(p)}f\end{aligned}\]이므로 원하는 결론을 얻는다.
참고문헌
[War] Frank W. Warner. Foundations of Differentiable Manifolds and Lie Groups, Graduate texts in mathematics, Springer, 2013
[Lee] John M. Lee. Introduction to Smooth Manifolds, Graduate texts in mathematics, Springer, 2012
댓글남기기