
This post was translated from Korean by LLM (Kimi). The translation may contain errors or awkward sentences. The Korean original is the source of truth.
We previously defined the tangent space \(T_pM\) of a manifold \(M\), showed that its dimension is the same as that of the original manifold \(M\), and also defined its natural basis. In this post we define functions between two manifolds and examine how they behave on tangent spaces.
Functions between Smooth Manifolds
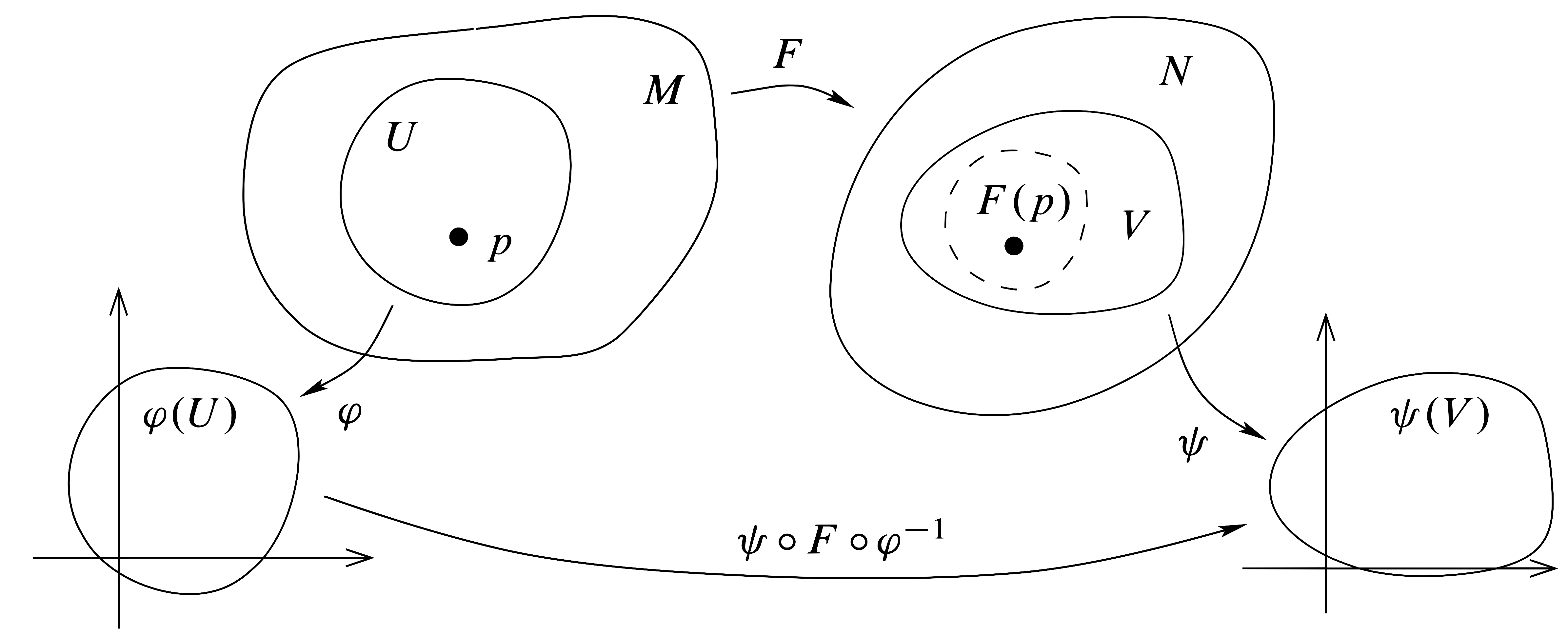
Definition 1 Let two manifolds \(M,N\) be given. A function \(F:M\rightarrow N\) is said to be \(C^\infty\) at a point \(p\in M\) if there exist a coordinate system \((U,\varphi)\) containing \(p\) and a coordinate system \((V,\psi)\) with \(F(U)\subseteq V\) such that \(\psi\circ F\circ\varphi^{-1}\) is \(C^\infty\).
If \(F\) is \(C^\infty\) at every point, we simply call it a \(C^\infty\) function.
As before when we defined \(C^\infty\) functions from a manifold to \(\mathbb{R}\), we should show that this definition is independent of the choice of coordinate system, but this is essentially the same as what we proved after §Smooth Manifolds, ⁋Definition 2, so we omit it.
Proposition 2 Let two manifolds \(M,N\) be given. If \(F:M\rightarrow N\) is \(C^\infty\) at a point \(p\in M\), then this function is continuous at \(p\).
Proof
Assume the situation of Definition 1 as is. Then first, the function \(\psi\circ F\circ\varphi^{-1}:\varphi(U)\rightarrow\psi(V)\) between Euclidean spaces is \(C^\infty\). Since this function is differentiable, it is obviously continuous. But \(\varphi\) and \(\psi\) are both homeomorphisms, so
\[F=\psi^{-1}\circ(\psi\circ F\circ\varphi^{-1})\circ\varphi\]is continuous as a composition of continuous functions.
Example 3 \(\id_M:M\rightarrow M\) is obviously a \(C^\infty\) function. More generally, if we give any open subset \(U\subseteq M\) the open submanifold structure (§Examples of Manifolds, ⁋Definition 3), the inclusion map \(U\hookrightarrow M\) is a \(C^\infty\) function.
Example 4 For any two manifolds \(M,N\), the constant map sending every point \(p\in M\) to a fixed point \(q\in N\) is \(C^\infty\).
We have now defined the manifolds, which are the objects we deal with, and the functions between manifolds. The following proposition can be checked without difficulty.
Proposition 5 For three manifolds \(M,N,P\), if both \(F:M\rightarrow N\) and \(G:N\rightarrow P\) are \(C^\infty\), then their composition \(G\circ F\) is also \(C^\infty\).
Then it is clear that isomorphisms between manifolds should be defined as follows.
Definition 6 If for two manifolds \(M,N\), there exist \(F:M\rightarrow N\) and \(G:N\rightarrow M\) such that \(G\circ F=\id_M\) and \(F\circ G=\id_N\), then we call each of \(F\) and \(G\) a diffeomorphism, and say that \(F\) and \(G\) are diffeomorphic.
Thus, manifolds and smooth functions form the category \(\Man\).
Remark We can give distinct smooth structures on the same topological manifold \(M\) that are diffeomorphic to each other but not identical. Define two smooth structures \(\mathcal{A}_1\), \(\mathcal{A}_2\) by the single charts \((\mathbb{R},\id_\mathbb{R})\) and \((\mathbb{R}, x\mapsto x^{3})\), respectively. Then \(\mathcal{A}_1\) and \(\mathcal{A}_2\) define different smooth structures. (§Smooth Manifolds, ⁋Example 4)
For convenience, let us denote \((M,\mathcal{A}_1)\) by \(M_1\), \((M,\mathcal{A}_2)\) by \(M_2\), \(\varphi=\id_\mathbb{R}\), and \(\psi=(x\mapsto x^3)\).
These two manifolds \(M_1, M_2\) are diffeomorphic to each other. Define the function \(F\) from \(M_1\) to \(M_2\) by \(x\mapsto x^{1/3}\). Then obviously \(F^{-1}\) is defined by \(y\mapsto y^3\). By definition \(F\) is \(C^\infty\). For any point \(p\in M_1\), if we take the two coordinate systems \((\mathbb{R},\varphi)\) and \((\mathbb{R},\psi)\) defined on \(M_1\) and \(M_2\) respectively, it is obvious that \(p\in\mathbb{R}\) and \(F(\mathbb{R})\subset\mathbb{R}\), and since they satisfy
\[(\psi\circ F\circ \varphi^{-1})(t)=t\]we have that \(\psi\circ\varphi^{-1}\) is \(C^\infty\).
Moreover, \(F^{-1}\) is also \(C^\infty\), because similarly for any point \(q\in M_2\), if we take the same coordinate systems as above, then \(q\in\mathbb{R}\) and \(F^{-1}(\mathbb{R})\subset\mathbb{R}\) hold, and moreover
holds.
Differentials
A manifold is basically a space where differentiation is possible, so in order to understand a function between manifolds we must know how this function transforms differentials, that is, elements of the tangent space.
Let a \(C^\infty\) function \(F:M\rightarrow N\) between two manifolds be given. The function \(F\) naturally induces the function \(F^\ast:\mathcal{C}_{N,F(p)}^\infty\rightarrow \mathcal{C}_{M,p}^\infty\) defined by the formula
\[g\mapsto g\circ F\]Moreover, for any \(f,g\in \mathcal{C}_{N,F(p)}^\infty\) and any real number \(\alpha\in\mathbb{R}\),
\[F^\ast(f+g)=(f+g)\circ F=f\circ F+g\circ F=F^\ast(f)+F^\ast(g),\quad F^\ast(\alpha f)=(\alpha f)\circ F=\alpha(f\circ F)=\alpha F^\ast(f)\]hold, so \(F^\ast\) is a linear map between two \(\mathbb{R}\)-vector spaces.
On the other hand, \(T_pM\) and \(T_{F(p)}N\) are the elements among linear maps from \(\mathcal{C}^\infty_{M,p}\) and \(\mathcal{C}^\infty_{N,F(p)}\) to \(\mathbb{R}\) that satisfy the Leibniz rule, so they become subspaces of the respective dual spaces \((\mathcal{C}^\infty_{M,p})^\ast\) and \((\mathcal{C}^\infty_{N,F(p)})^\ast\). Therefore, we can consider the dual map \((F^\ast)^\ast:(\mathcal{C}^\infty_{M,p})^\ast\rightarrow(\mathcal{C}^\infty_{N,F(p)})^\ast\) of the linear map \(F^\ast:\mathcal{C}^\infty_{N,F(p)}\rightarrow \mathcal{C}^\infty_{M,p}\) obtained above.
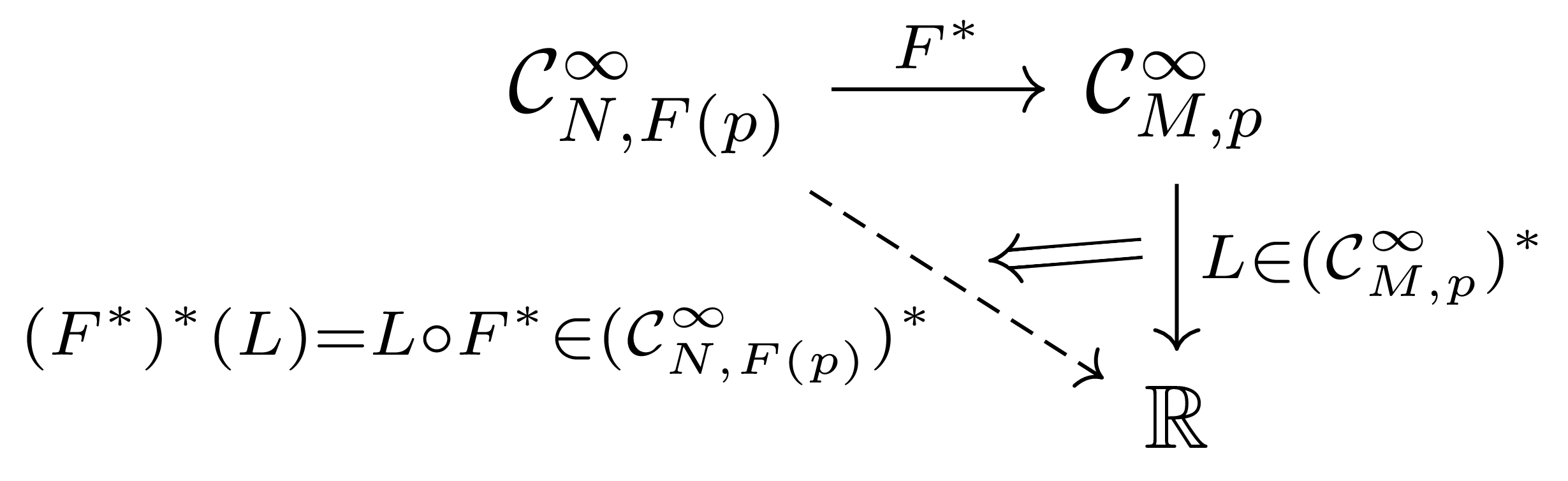
Explicitly, this is the function defined for any linear map \(L\in (\mathcal{C}^\infty_{M,p})^\ast\) by
\[(F^\ast)^\ast(L)=L\circ F^\ast\]Restricting this definition to \(T_pM\), we obtain the desired definition.
Before that, let us reorganize the above discussion from the viewpoint of elements of the vector spaces: \((F^\ast)^\ast\vert_{T_pM}\) sends any \(v\in T_pM\) to \(v\circ F^\ast\in (\mathcal{C}^\infty_{N,F(p)})^\ast\). On the other hand, since \(v\circ F^\ast\) is an element of \((\mathcal{C}^\infty_{N,F(p)})^\ast\), it is defined by how it acts on any \(g\in \mathcal{C}^\infty_{N,F(p)}\), namely
\[(v\circ F^\ast)(g)=v(F^\ast(g))=v(g\circ F)\]Moreover, this \(v\circ F^\ast\) defined in this way actually belongs to \(T_{F(p)}N\). That is, it satisfies the Leibniz rule. This follows from the formula
\[\begin{aligned}(v\circ F^\ast)(fg)&=v(F^\ast(fg))=v((f\circ F)(g\circ F))\\ &=(f\circ F)(p)v(g\circ F)+(g\circ F)(p) v(f\circ F)\\ &=f(F(p))(v\circ F^\ast)(g)+g(F(p))(v\circ F^\ast)(f)\end{aligned}\]Summarizing the discussion so far, we have the following.
Definition 7 Let \(F:M\rightarrow N\) be a \(C^\infty\) function between two manifolds. For any \(p\in M\), the differential of \(F\) at the point \(p\), \(dF_p:T_pM\rightarrow T_{F(p)}N\), is the linear map defined for any \(v\in T_pM\) and any \(g\in \mathcal{C}^\infty_{N,F(p)}\) by
\[(dF_p(v))g=v(g\circ F)\]Several consequences are obvious from the definition. First, for \(\id_M:M\rightarrow M\), \(d(\id_M)_p\) is always the identity \(\id_{T_pM}\) from \(T_pM\) to \(T_pM\). This is clear from the formula in Definition 7. Also, for three manifolds \(M,N,P\), if \(F:M\rightarrow N\) and \(G:N\rightarrow P\) are \(C^\infty\), then the formula
\[d(G\circ F)_p=(dG_{F(p)})\circ (dF_p)\]holds. This is obvious either from the fact that the pullback used to define the differential preserves composition well, or likewise by directly substituting \(G\circ F\) into the formula of Definition 7. From this we can show that for a diffeomorphism \(F\), \(dF_p\) is always an isomorphism between vector spaces.
However, among \(C^\infty\) functions for which the differential is an isomorphism, there are very many that are not diffeomorphisms.
Proposition 8 For a manifold \(M\) and an open submanifold \(U\) of \(M\), the inclusion map \(\iota:U\hookrightarrow M\) induces an isomorphism between tangent spaces for every \(p\in U\). That is, \(d\iota_p\) is always an isomorphism.
Proof
This is obvious because \(\iota^\ast\) induces an isomorphism between \(\mathcal{C}^\infty_{U,p}\) and \(\mathcal{C}^\infty_{M,\iota(p)}\). In fact, from the beginning there is no harm in regarding the two vector spaces as the same.
Basis of Tangent Spaces and Differentials
Regarding \(\mathbb{R}^m\) as an \(m\)-dimensional manifold, we can see that the way we defined tangent vectors is exactly the same as directional vectors in \(\mathbb{R}^m\). In this case, for any \(p\in\mathbb{R}^m\), the standard \(m\) vectors of \(\mathbb{R}^m\) based at the point \(p\) define directional derivatives in their respective directions, and we agreed to write these as
\[\frac{\partial}{\partial r^1}\bigg|_p,\cdots,\frac{\partial}{\partial r^m}\bigg|_p\]For a general manifold, we chose a coordinate system \((U,\varphi)\) containing \(p\in M\), and then expressed tangent vectors using the component functions \(x^1,\ldots, x^m\) of \(\varphi\) as
\[\frac{\partial}{\partial x^1}\bigg|_p,\cdots,\frac{\partial}{\partial x^m}\bigg|_p\]Then, for any \(f\in C^\infty_p(M)\),
\[\frac{\partial}{\partial x^i}\bigg|_pf=\frac{\partial}{\partial r^i}\bigg|_p (f\circ\varphi^{-1})\]holds. However, keeping Definition 7 in mind and looking at this formula again, we can see that it has exactly the same form as the differential of \(\varphi^{-1}:\varphi(U)\rightarrow U\).1 In other words, the basis of the tangent space is nothing other than the \(m\) bases of the tangent space \(T_{\varphi(p)}\mathbb{R}^m\) of \(\mathbb{R}^m\) transferred via the differential \(d\varphi^{-1}_{\varphi(p)}\).
From a more linear-algebraic point of view, if \(\mathcal{B}\) is the standard basis of \(\mathbb{R}^m\) and \(\mathcal{C}\) is the basis of \(T_pM\) consisting of the \(\partial/\partial x^i\), then the matrix representation of the linear map \(d\varphi^{-1}_{\varphi(p)}\) from \((T_{\varphi(p)}\mathbb{R}^n, \mathcal{B})\) to \((T_pM, \mathcal{C})\) can be said to be exactly the identity matrix.
More generally, let \(M,N\) be manifolds of dimensions \(m,n\) respectively, and let \(F:M\rightarrow N\) be any \(C^\infty\) function. Then for a fixed \(p\in M\), there exist a coordinate system \((U,\varphi)\) containing \(p\) and a coordinate system \((V,\psi)\) containing \(F(U)\) such that \(\psi\circ F\circ\varphi^{-1}\) is \(C^\infty\). Now let \(\varphi=(x^i)_{i=1}^{m}\) and \(\psi=(y^j)_{j=1}^n\). Then likewise the bases of the tangent spaces \(T_pM\) and \(T_{F(p)}N\) are given respectively by
\[\frac{\partial}{\partial x^1}\bigg|_p,\cdots,\frac{\partial}{\partial x^m}\bigg|_p,\quad\text{and}\quad\frac{\partial}{\partial y^1}\bigg|_{F(p)},\cdots\frac{\partial}{\partial y^n}\bigg|_{F(p)}\]Let us now represent \(dF_p\) as a matrix via these. To do this, we need to express the vector to which each \(\partial/\partial x^i\) is sent by \(dF_p\) as a linear combination of the \(\partial/\partial y^j\). That is, we need only find the coefficients \(a_{ji}\) in
\[dF_p\left(\frac{\partial}{\partial x^i}\bigg|_p\right)=a_{1i}\frac{\partial}{\partial y^1}\bigg|_{F(p)}+\cdots+a_{ni}\frac{\partial}{\partial y^n}\bigg|_{F(p)}\]But since the \(\partial/\partial y^j\) are the dual basis of the elements \(y^j+\mathfrak{n}^2\) of \(\mathfrak{n}/\mathfrak{n}^2\), to do this we simply apply both sides to the function \(y^j\).2 Namely, from
\[dF_p\left(\frac{\partial}{\partial x^i}\bigg|_p\right)y^j=a_{1i}\frac{\partial}{\partial y^1}\bigg|_{F(p)}y^j+\cdots+a_{ji}\frac{\partial}{\partial y^j}\bigg|_{F(p)}y^j+\cdots+a_{ni}\frac{\partial}{\partial y^n}\bigg|_{F(p)}y^j\]by the definition of the dual basis the right-hand side leaves only \(a_{ji}\), so
\[dF_p\left(\frac{\partial}{\partial x^i}\bigg|_p\right)y^j=a_{ji}\]and from this we see that the matrix representation of \(dF_p\) with respect to the two bases \(\partial/\partial x^i\) and \(\partial/\partial y^j\) is the matrix
\[\begin{pmatrix}\partial(y^1\circ F)/\partial x^1&\partial(y^1\circ F)/\partial x^2&\cdots&\partial(y^1\circ F)/\partial x^m\\\partial(y^2\circ F)/\partial x^1&\partial(y^2\circ F)/\partial x^2&\cdots&\partial(y^2\circ F)/\partial x^m\\\vdots&\vdots&\ddots&\vdots\\\partial(y^n\circ F)/\partial x^1&\partial(y^n\circ F)/\partial x^2&\cdots&\partial(y^n\circ F)/\partial x^m\end{pmatrix}\]That is, this is nothing but the Jacobian of the function \(\psi\circ F\circ\varphi^{-1}\) between Euclidean spaces.
In particular, if \(M=N\) and \(F=\id_M\) but we choose different coordinate systems \((U, \varphi)\) and \((V,\psi)\), this becomes the Jacobian matrix of the transition map \(\psi\circ\varphi^{-1}\).
References
[War] Frank W. Warner. Foundations of Differentiable Manifolds and Lie Groups, Graduate texts in mathematics, Springer, 2013
[Lee] John M. Lee. Introduction to Smooth Manifolds, Graduate texts in mathematics, Springer, 2012
댓글남기기