
This post was translated from Korean by LLM (Kimi). The translation may contain errors or awkward sentences. The Korean original is the source of truth.
In the previous post we studied differentials in depth, and now we look at some examples.
Curves and Velocity Vectors on Manifolds
Definition 1 For a manifold \(M\), we call a \(C^\infty\) function \(\gamma:(a,b)\rightarrow M\) a \(C^\infty\) curve defined on \(M\), and for any \(t\in (a,b)\) we call
\[d\gamma_t\left(\frac{d}{dr}\bigg|_t\right)\]the velocity vector of this curve at the point \(\gamma(t)\), and denote it by \(\gamma'(t)\).
As an element of \(T_{\gamma(t)}M\), the vector \(\gamma'(t)\) acts on each element \(f\) of \(\mathcal{C}^\infty_{M,\gamma(t)}\), and writing out the definition of the differential we see that
\[\gamma'(t)f=d\gamma_p\left(\frac{d}{dr}\bigg|_t\right)f=\frac{d}{dr}\bigg|_t (f\circ\gamma)=\frac{d(f\circ \gamma)}{dr}(t)=(f\circ\gamma)'(t)\]holds.
In fact, when defining \(T_pM\), we may just as well think of it as the collection of \(C^\infty\) curves passing through the point \(p\)1. We give a proof of the following proposition, which is part of this claim and will be used frequently.
Proposition 2 Fix a manifold \(M\) and a point \(p\in M\). For any nonzero \(v\in T_pM\), there exists a \(C^\infty\) curve \(\gamma\) passing through the point \(p\) whose velocity vector at \(p\) is \(v\).
Proof
We only need to find a coordinate system \((U,\varphi)\) centered at \(p\) satisfying the equation
\[v=d\varphi^{-1}_{\varphi(p)}\left(\frac{\partial}{\partial r^1}\bigg|_0\right)\]Then \(v\) becomes the velocity vector at \(t=0\) of the \(C^\infty\) curve
\[\gamma: t\mapsto \varphi^{-1}(t, 0,\cdots, 0)\]Incidentally, finding a coordinate system satisfying the above condition is very easy: choose an arbitrary coordinate system \((U,\psi)\), then construct a new basis of \(\mathbb{R}^n\) containing the translated vector \(d\psi_p(v)\), and compose the original \(\psi\) with the resulting change of basis.
In the special case \(M=\mathbb{R}^m\), a basis of \(T_{\gamma(t)}M\) is given by
\[\frac{\partial}{\partial r^1}\bigg|_{\gamma(t)},\cdots,\frac{\partial}{\partial r^m}\bigg|_{\gamma(t)}\]so
\[\gamma'(t)=\sum_{i=1}^m\frac{d(r^i\circ \gamma)}{dr}(t)\frac{\partial}{\partial r^i}\bigg|_{\gamma(t)}=\frac{d\gamma^1}{dr}\frac{\partial}{\partial r^1}\bigg|_{\gamma(t)}+\cdots+\frac{d\gamma^m}{dr}\frac{\partial}{\partial r^m}\bigg|_{\gamma(t)}\]and since in Euclidean space these \(\partial/\partial r^i\) coincide with the \(i\)th standard basis, we may think of this as
\[\left(\frac{d\gamma^1}{dr},\ldots, \frac{d\gamma^m}{dr}\right)\]This is identical to the usual derivative
\[\gamma'(t)=\lim_{h\rightarrow 0}\frac{\gamma(t+h)-\gamma(t)}{h}\]so we can verify that the notions of tangent vector and velocity vector we defined agree in Euclidean space with the (previously known) velocity vector of a curve.
Suppose we are given a \(C^\infty\) function \(F:M\rightarrow N\) between two manifolds \(M,N\), and consider a \(C^\infty\) function \(\gamma:(a,b)\rightarrow M\). Then computing the differential of \(F\circ\gamma\) at \(t\) gives
\[d(F\circ\gamma)_t=dF_{\gamma(t)}\circ d\gamma_t\]and therefore
\[d(F\circ\gamma)_t\left(\frac{d}{dr}\bigg|_t\right)=(dF_{\gamma(t)}\circ d\gamma_t)\left(\frac{d}{dr}\bigg|_t\right)=dF_{\gamma(t)}(\gamma'(t))\]Since the left-hand side can be regarded as the velocity vector at time \(t\) of the \(C^\infty\) curve \(F\circ\gamma\) in \(N\), the above equation can be written as
\[(F\circ\gamma)'(t)=dF_{\gamma(t)}(\gamma'(t))\]Modifying this slightly, for a given \(C^\infty\) function \(F:M\rightarrow N\), we can see that in order to know the value \(dF_p(v)\) of the differential at any \(v\in T_pM\), we may simply choose any curve having velocity vector in the \(v\) direction at the point \(p\)2, and then compute the velocity vector of \(F\circ\gamma\) at time \(t\) for this curve \(\gamma\). That is,
Proposition 3 Consider two manifolds \(M,N\) and a \(C^\infty\) function \(F:M\rightarrow N\). For any \(v\in T_pM\), any \(C^\infty\) curve \(\gamma:(a,b)\rightarrow M\) satisfying \(\gamma(0)=p\) and \(\gamma'(0)=v\) also satisfies the equation
\[dF_p(v)=(F\circ\gamma)'(0)\]Tangent Spaces of Vector Spaces
In §Examples of Differentiable Manifolds, ⁋Example 2, we saw that any \(m\)-dimensional \(\mathbb{R}\)-vector space \(V\) has the structure of an \(m\)-dimensional manifold. Then for any point \(x\in V\), the tangent space \(T_xV\) at \(x\) has the same dimension as the manifold \(V\), so \(\dim T_xV=m\) holds. Therefore we must have \(V\cong T_xV\).
This can be shown using the fact that in Euclidean space, the standard vectors of \(\mathbb{R}^m\) and the bases
\[\frac{\partial}{\partial r^1}\bigg|_x,\cdots,\frac{\partial}{\partial r^m}\bigg|_x\]of \(T_x\mathbb{R}^m\) are essentially the same. In fact, this isomorphism does not depend on the choice of basis: for any \(v\in\mathbb{R}^m\), it is the correspondence with the directional derivative
\[D_v|_x: f\mapsto \lim_{h\rightarrow 0}\frac{f(x+tv)-f(x)}{t}\]that gives this isomorphism.
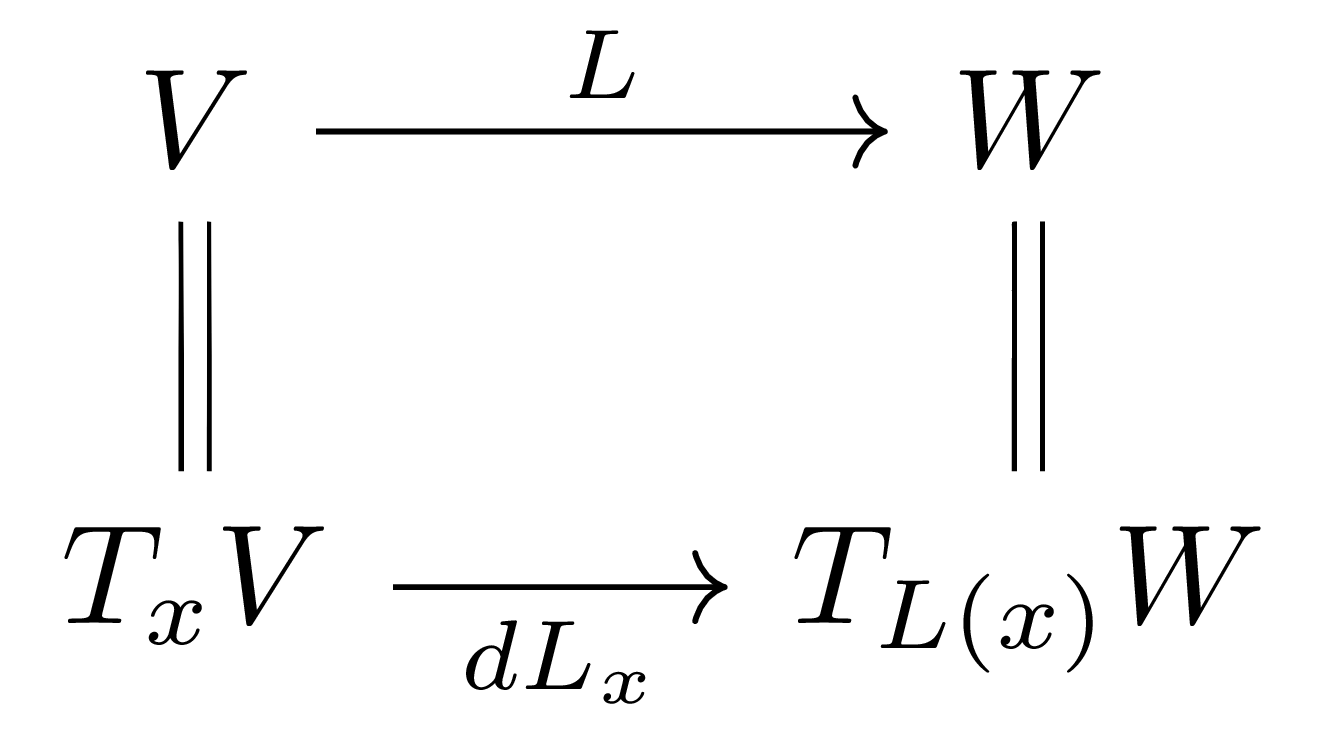
Proposition 4 Consider an \(m\)-dimensional \(\mathbb{R}\)-vector space \(V\) equipped with a manifold structure. For any point \(x\in V\), there exists an isomorphism \(V\cong T_xV\) that is independent of the choice of basis. Moreover, if \(V,W\) are two \(\mathbb{R}\)-vector spaces and \(L:V\rightarrow W\) is a linear map, then the following diagram commutes.
Proof
For the first part, we use the directional derivative formula shown above,
\[(D_v|_x)f=\lim_{t\rightarrow 0}\frac{f(x+tv)-f(x)}{t}\]Under the correspondence \(v\mapsto D_v\vert_x\), the vector \(v+w\) is sent to
\[\begin{aligned}(D_{v+w}|_x)f&=\lim_{t\rightarrow 0}\frac{f(x+t(v+w))-f(x)}{t}\\ &=\lim_{t\rightarrow 0}\left(\frac{f((x+tw)+tv)-f(x+tw)}{t}+\frac{f(x+tv)-f(x)}{t}\right)\\ &=(D_v|_x)f+(D_w|_x)f \end{aligned}\]and similarly \(\alpha v\) yields
\[(D_{\alpha v}|_x)f=\lim_{t\rightarrow 0}\frac{f(x+t\alpha v)-f(x)}{t}=\alpha\lim_{t\rightarrow 0}\frac{f(x+t\alpha v)-f(x)}{\alpha t}=\alpha(D_v|_x)f\]Therefore \(v\mapsto D_v\vert_x\) is linear.
That this correspondence is injective can be seen by plugging in \(x^1,\ldots, x^m\) for \(f\), and since the two vector spaces have the same dimension, this correspondence must be an isomorphism. Thus we obtain the isomorphism \(V\cong T_xV\).
We must show the second part. Following \(V\rightarrow W\rightarrow T_{L(x)}W\), any \(v\in V\) is sent to
\[v\mapsto L(v)\mapsto D_{L(v)}|_{L(x)}\]On the other hand, following \(V\rightarrow T_xV\rightarrow T_{L(x)}W\), we first obtain
\[v\mapsto D_v|_x\]via \(V\rightarrow T_xV\), and then using \(\gamma(t)=x+tv\) and Proposition 3 we get
\[dL_x(D_v|_x)=(L\circ \gamma)'(0)\]But
\[(L\circ\gamma)(t)=L(x+tv)=L(x)+tL(v)\]so for any \(f\), \((L\circ\gamma)'(0)\) satisfies
\[(L\circ\gamma)'(0)f=\lim_{t\rightarrow 0}\frac{f(L(x)+tL(v))-f(L(x))}{t}=(D_{L(v)}|_{L(x)})f\]Therefore the given diagram commutes.
The isomorphism \(V\cong T_xV\) constructed in the above proposition does not depend on the choice of basis, but if a basis \(e_1,\ldots, e_n\) of \(V\) and its dual basis \(r^1,\ldots, r^n\) are given, then one can check that this isomorphism is given by
\[\sum a_ie_i\leftrightarrow\sum a_i\frac{\partial}{\partial r^i}\]Example 5 The collection \(\Mat_n(\mathbb{R})\) of \(n\times n\) matrices is an \(n^2\)-dimensional \(\mathbb{R}\)-vector space. Therefore, the tangent space at any point of \(\Mat_n(\mathbb{R})\) is the same as \(\Mat_n(\mathbb{R})\).
In particular, considering the open submanifold \(\GL(n,\mathbb{R})\) of \(\Mat_n(\mathbb{R})\), the tangent space at any element of \(\GL(n,\mathbb{R})\) is the same as the tangent space of that element viewed as an element of \(\Mat_n(\mathbb{R})\), and hence equals \(\Mat_n(\mathbb{R})\).
Tangent Covectors
Suppose we are given an arbitrary manifold \(M\) and a \(C^\infty\) function \(f:M\rightarrow\mathbb{R}\). Then for every point \(p\in M\), the differential \(df_p:T_pM\rightarrow T_{f(p)}\mathbb{R}\) is well defined. By Proposition 4, there exists an isomorphism between \(\mathbb{R}\) and its tangent space \(T_{f(p)}\mathbb{R}\) as 1-dimensional \(\mathbb{R}\)-vector spaces. Thus, via
\[T_pM\overset{df_p}{\longrightarrow}T_{f(p)}\mathbb{R}\overset{\sim}{\longrightarrow}\mathbb{R}\]we may regard \(df_p\) as an element of \((T_pM)^\ast\).
Definition 6 For a manifold \(M\) and a point \(p\in M\), the dual space \((T_pM)^\ast\) of the \(\mathbb{R}\)-vector space \(T_pM\) is called the cotangent space, and is written simply as \(T_p^\ast M\). The elements of \(T_p^\ast M\) are called tangent covectors, or simply covectors.
Therefore, the preceding discussion can be summarized as saying that any \(C^\infty\) function \(f:M\rightarrow\mathbb{R}\) determines a tangent covector.
Meanwhile, \(T_p^\ast M\) is the dual space of the vector space \(T_pM\), and since \(T_pM\) is a finite-dimensional \(\mathbb{R}\)-vector space, any basis of \(T_pM\) defines a dual basis of \(T_p^\ast M\).
Let \((U,\varphi)\) be a coordinate system containing the point \(p\), and write \(\varphi=(x^i)_{i=1}^m\). Then the following \(m\) tangent vectors
\[\frac{\partial}{\partial x^1}\bigg|_p,\cdots\frac{\partial}{\partial x^m}\bigg|_p\]form a basis of \(T_pM\). Let us temporarily denote their dual basis by \(\xi^i \vert_p\). That is, \(\xi^i \vert_p\) is a linear map from \(T_pM\) to \(\mathbb{R}\), uniquely defined by the formula
\[(\xi^i |_p)\left(\frac{\partial}{\partial x^j}\bigg|_p\right)=\delta_{ij}\tag{1}\]Here \(\delta_{ij}\) denotes the Kronecker delta.
Proposition 7 In the situation above, \(\xi^i\vert_p=dx^i\vert_p\). In other words, the dual bases \((\xi^i \vert_p)\) of \(T_pM\) arising from \((U,\varphi)\) are in fact the differentials at the point \(p\) of the coordinate functions \(x^i\).
Proof
It suffices to show that the \(dx^i\) satisfy equation (1) above. By definition,
\[dx^i|_p\left(\frac{\partial}{\partial x^j}\bigg|_p\right)=\frac{\partial}{\partial x^j}\bigg|_p x^i=\delta_{ij}\]holds.
This proof becomes more convincing if we recall §Cotangent Space, ⁋Lemma 1, which we proved when we first introduced the tangent space. That is, passing from the first equality to the second is by definition of the differential \(dx^i\vert_p\), but at the same time it is the process of naturally identifying the double dual of the finite-dimensional \(\mathbb{R}\)-vector space \(\mathfrak{m}_p/\mathfrak{m}^2_p\) with itself via
\[T_p^\ast M\cong (\mathfrak{m}_p/\mathfrak{m}_p^2)^{\ast\ast}\cong\mathfrak{m}_p/\mathfrak{m}^2_p\]References
[War] Frank W. Warner. Foundations of Differentiable Manifolds and Lie Groups, Graduate texts in mathematics, Springer, 2013
[Lee] John M. Lee. Introduction to Smooth Manifolds, Graduate texts in mathematics, Springer, 2012
-
More precisely, we must give an equivalence relation by treating curves having the same velocity vector at the point \(p\) as identical. ↩
-
By Proposition 2, at least one such curve exists. ↩
댓글남기기