
This post was translated from Korean by LLM (Kimi). The translation may contain errors or awkward sentences. The Korean original is the source of truth.
Our central question is, given a matrix \(A\), what information obtainable from \(A\) determines \(A\) uniquely up to \(\sim\), that is, as a linear operator. The answer to this lies (almost entirely) in the eigenvalues and eigenvectors of the matrix, and to define these we must first define the determinant.
Definition of the Determinant
The determinant we will define is a scalar \(\det A\) corresponding to an \(n\times n\) square matrix \(A\). Algebraically, the determinant can be viewed as a real number that determines whether \(A^{-1}\) exists depending on whether its value is \(0\) or not. There are several ways to compute the determinant, and some of these are accepted as definitions, but none of them capture the essential meaning of the determinant. We first give the correct definition of the determinant, and then introduce its computation in the process of proving its existence.
The determinant is a function from \(\Mat_n(\mathbb{K})\) to \(\mathbb{K}\). Now, thinking of each matrix in \(\Mat_n(\mathbb{K})\) as a collection of \(n\) vectors in \(\mathbb{K}^n\), the determinant becomes a function from \((\mathbb{K}^n)^n\), i.e., the space obtained by taking the product of the vector space \(\mathbb{K}^n\) with itself \(n\) times, to \(\mathbb{K}\). Thus, for any matrix \(A\in\Mat_n(\mathbb{K})\), we denote the determinant of \(A\) by \(\det(A)\), and simultaneously also write \(\det(A_1,\ldots, A_n)\) using the column vectors of \(A\). This is equivalent to identifying the two \(n^2\)-dimensional \(\mathbb{K}\)-vector spaces \(\Mat_n(\mathbb{K})\) and \((\mathbb{K}^n)^n\cong \mathbb{K}^{n^2}\) via the following isomorphism:
\[A=(A_1\;A_2\;\cdots\;A_n)\cong (A_1, A_2, \cdots, A_n)\cong \bigl((A_{11}, A_{21}, \ldots, A_{n1}), (A_{12},A_{22},\ldots, A_{n2}),\ldots, (A_{1n},A_{2n},\ldots, A_{nn})\bigr)\]Definition 1 For \(\mathbb{K}\)-vector spaces \(V,W\), a function
\[f:\underbrace{V\times\cdots\times V}_\text{ {\footnotesize $n$} times}\rightarrow W\]is called a multilinear map if \(f\) is linear in each component.
In particular, when \(n=2\), we say \(f\) is bilinear.
Definition 2 Let two \(\mathbb{K}\)-vector spaces \(V,W\) and a multilinear map
\[f: \underbrace{V\times\cdots\times V}_\text{ {\footnotesize $n$} times}\rightarrow W\]be given. If for any \(v_1,\ldots, v_n\) and any \(i\neq j\) the following equation
\[f(v_1,\ldots, v_i, \ldots, v_j,\ldots, v_n)=-f(v_1,\ldots, v_j,\ldots, v_i,\ldots, v_n)\]always holds, then we call \(f\) an alternating multilinear map.
As above, let a multilinear map \(f:V\times\cdots\times V\rightarrow W\) be given. Then \(f\) is antisymmetric if for any \(v_1,\ldots, v_n\) and any \(i\neq j\), if \(v_i=v_j\) then \(f(v_1,\ldots, v_n)=0\).
Proposition 3 A multilinear map \(f:V\times\cdots\times V\rightarrow W\) is alternating if and only if it is antisymmetric.
Proof
First, assume that \(f\) is alternating. Then for any \(v_1,\ldots, v_n\in V\) satisfying \(v_i=v_j\),
\[\begin{aligned}f(v_1,\ldots,v_i,\ldots, v_j,\ldots, v_n)&=f(v_1\ldots, v_j,\ldots,v_i,\ldots, v_n)\\&=-f(v_1,\ldots, v_i,\ldots, v_j,\ldots, v_n)\end{aligned}\]holds, so \(f\) is also antisymmetric. (The first equality uses the fact that \(v_i=v_j\), and the second uses the fact that \(f\) is alternating.)
Conversely, assume that \(f\) is antisymmetric. For any \(v_1,\ldots, v_n\) and any \(i\neq j\), the fact that \(f\) is antisymmetric gives the equation
\[f(v_1,\ldots, v_i+v_j,\ldots, v_i+v_j,\ldots, v_n)=0\]where \(v_i+v_j\) appears in the \(i\)th and \(j\)th components, respectively. Now applying multilinearity, the above equation becomes
\[\begin{aligned}0&=f(v_1,\ldots, v_i,\ldots, v_i,\ldots, v_n)+f(v_1,\ldots, v_i,\ldots, v_j,\ldots,v_n)\\&\phantom{==}+f(v_1,\ldots, v_j,\ldots, v_i,\ldots,v_n)+f(v_1,\ldots, v_j,\ldots, v_j,\ldots, v_n)\end{aligned}\]and since \(f\) is antisymmetric, the first and last terms in which \(v_i\) and \(v_j\) each appear twice become \(0\). From this we obtain the desired conclusion.
In particular, suppose \(f\) is an alternating multilinear map in \(n\) variables and one of \(v_1,\ldots, v_n\) is a linear combination of the other \(n-1\) vectors. Then applying multilinearity and then the above proposition, we see that \(f(v_1,\ldots, v_n)=0\).
Now we are able to define the determinant.
Definition 4 We call an alternating multilinear map \(D:(\mathbb{K}^n)^n\rightarrow \mathbb{K}\) satisfying \(D(e_1,\ldots, e_n)=1\) the determinant.
We have not yet shown that the determinant exists or is unique, so we used the notation \(D\) instead of \(\det\). In the next post we introduce the computation of the determinant and prove this, after which we use the standard notation \(\det\).
Area and Volume
The area of a parallelogram is given by the length of its base times its height. Similarly, the volume of a parallelepiped is given by the area of its base times its height. It is not difficult to generalize this to higher dimensions as well. For convenience, we also refer to the
The above is likewise merely one way of finding the area of these figures. Giving the correct definition of area and volume endows the determinant with geometric meaning.
Suppose \(n\) linearly independent vectors in \(n\)-dimensional space are given. Then they form an \(n\)-dimensional parallelepiped. For example, when \(n=3\), three vectors \(v_1,v_2,v_3\) form a parallelepiped as follows.
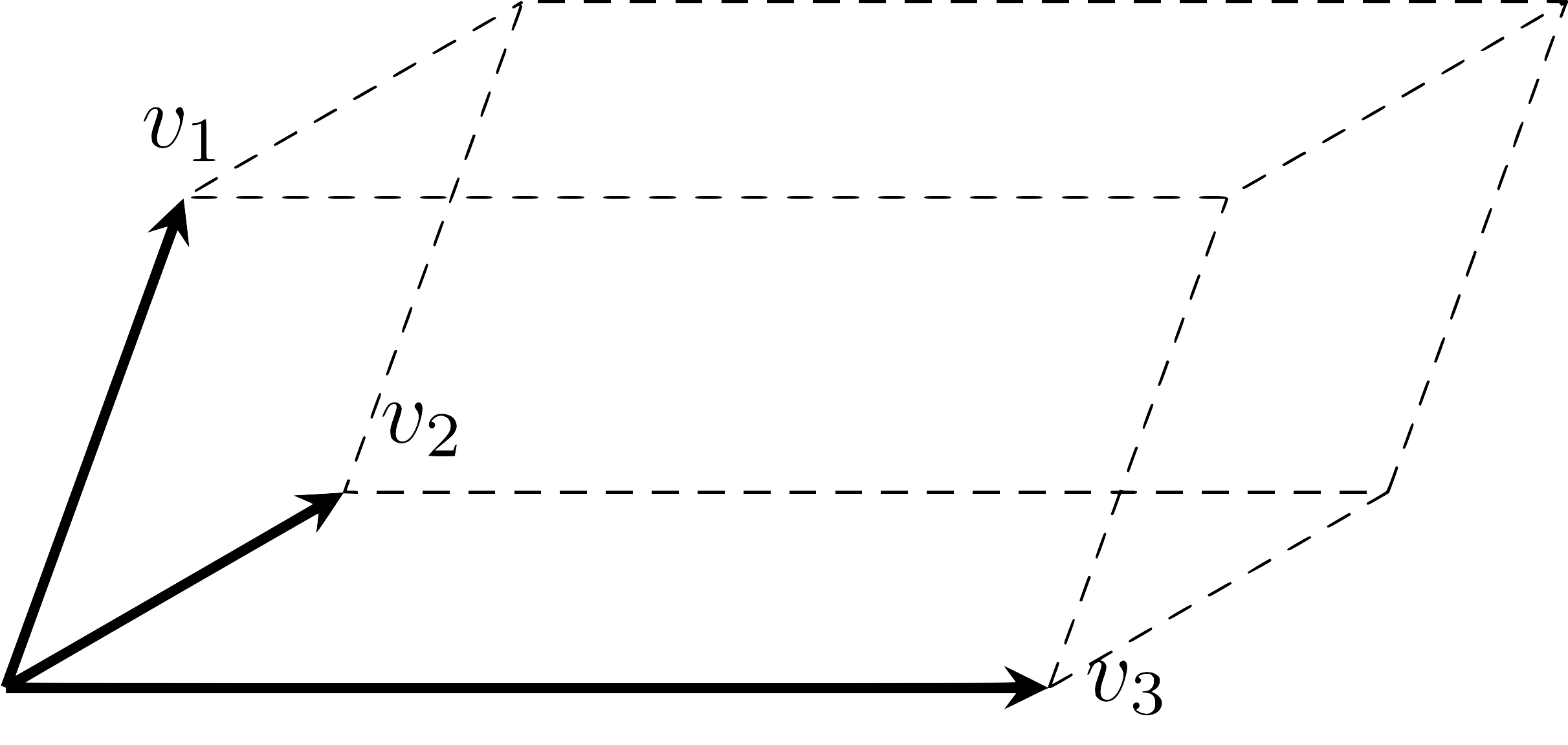
For convenience in exposition, all subsequent content will be explained using area in the plane, but it is not difficult to generalize all of this to \(n\)-dimensional space.
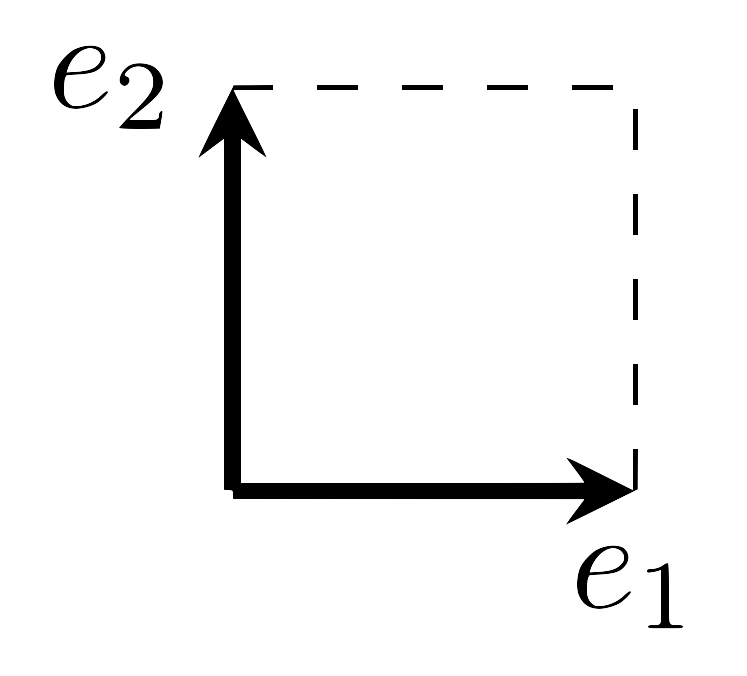
First, we must define which parallelogram has unit area 1. Of course there is much freedom of choice here, but the most reasonable method is to define a square with side length 1 as the parallelogram having unit area 1.
On the other hand, it is clear that starting from the above square and applying the following two rules, we can make all1 parallelograms.
- Shear: a transformation fixing one side of a parallelogram and translating the endpoint of the remaining side parallel to the fixed side.
- A transformation that scales the length of the remaining side by a factor of \(k>0\) while keeping one side fixed.
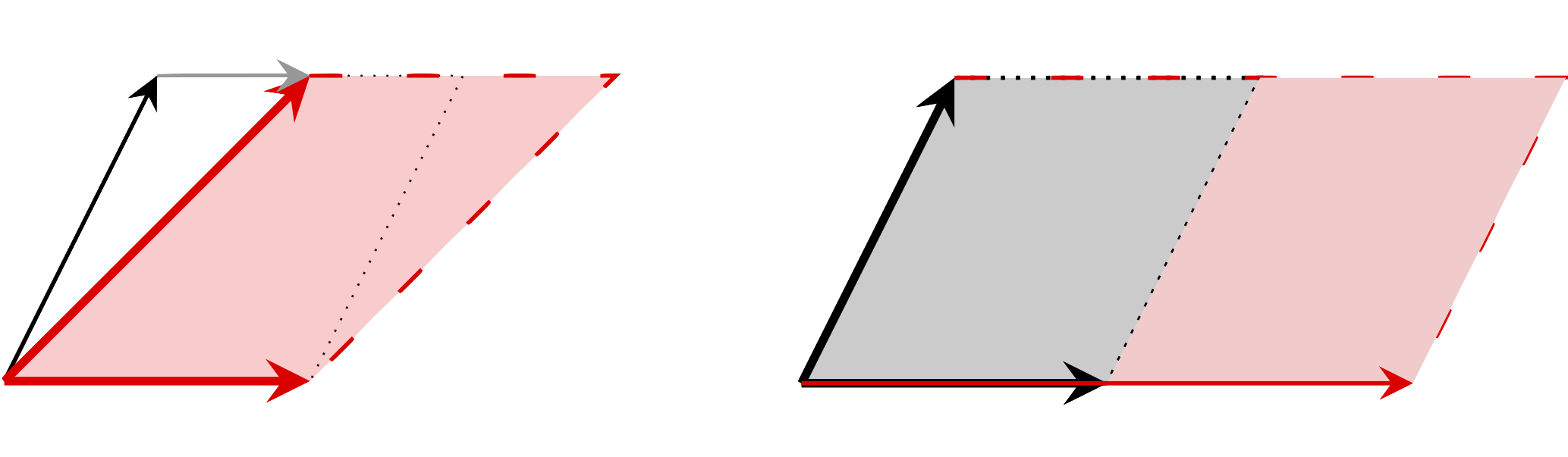
Therefore, if we define only how the area changes when we deform a parallelogram according to rules 1 and 2, we have defined the area of all parallelograms. In case 1, we define the area to remain unchanged, and in case 2, we define the area to be multiplied by \(k\). If we define it this way, the area of every parallelogram coincides with the familiar formula for the area of a parallelogram.2
Geometric Meaning of the Determinant
To lend geometric intuition to the determinant, in this section we think of \(\mathbb{K}\) as \(\mathbb{R}\). Except for the fact that \(D\) can take a negative sign, we can view \(D\) as an area function. In this case, the sign of \(D\) means
First, the first condition that \(D\) must satisfy, namely
In the general concept of area, even if we multiply the length of one side of a parallelogram by \(-1\), the area becomes positive. However, if we think of this figure as having the opposite orientation from the original figure, we can also view the area as negative, and then we can verify that \(D\) preserves arbitrary scalar multiplication of the length of one side, and thinking of shear transformations, \(D\) also preserves the sum of two vectors corresponding to one side as follows.
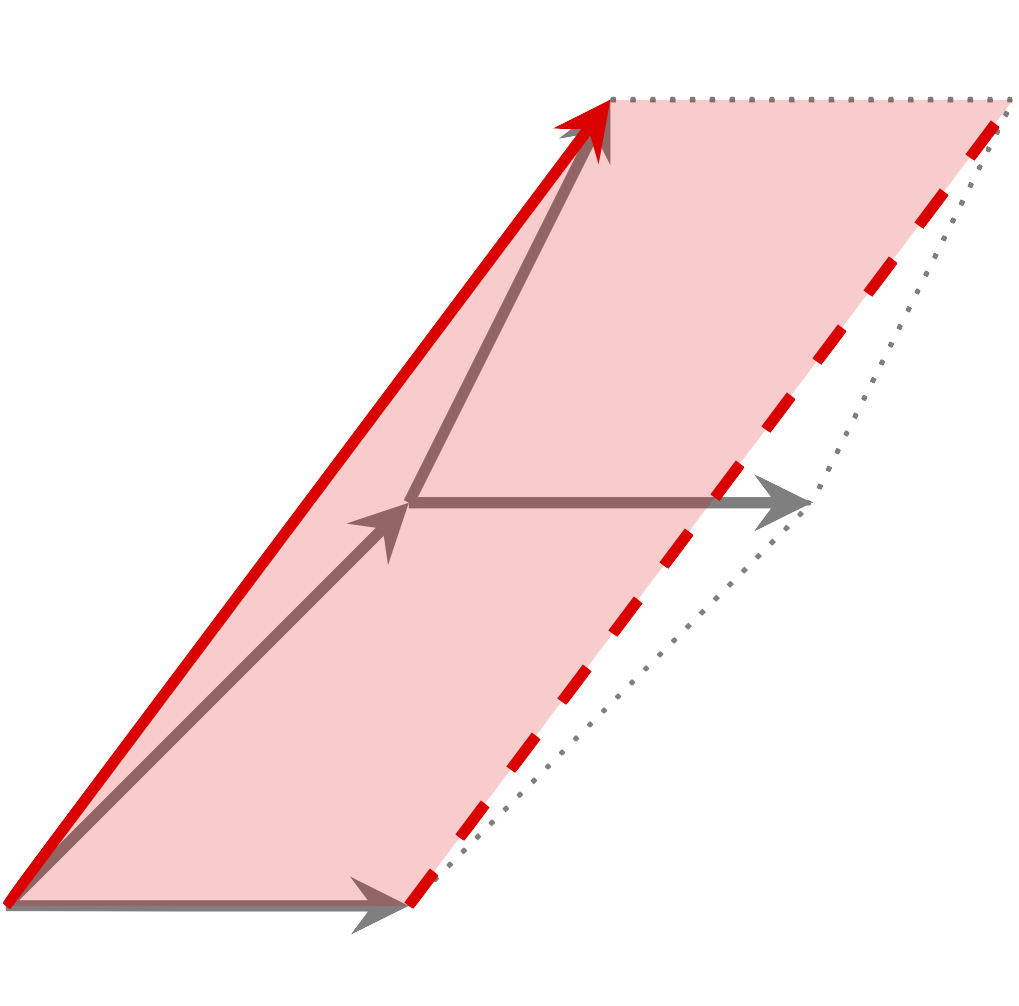
Moreover, thinking of shear transformations, for a fixed side \(v_n\), even if we add a linear combination of the \(n-1\) base vectors \(v_1,\ldots, v_{n-1}\) forming the base to \(v_n\), the value of \(D\) is preserved. This means that if \(v_n\) is a linear combination of \(v_1,\ldots, v_{n-1}\) then \(D(v_1,\ldots, v_n)=0\), and therefore by Proposition 3 this is equivalent to \(D\) being alternating.
We have not yet proved the uniqueness of the determinant, but we can verify that Definition 4 completely determines the determinant, and therefore we can think of the determinant as signed volume. Now from this picture, we can see that the reason the determinant being \(0\) is equivalent to \(A\) being non-invertible is that in \(n\)-dimensional space, the volume of a parallelepiped of dimension less than \(n\) is always 0.
In the next post we actually show that the determinant exists uniquely. Through this we learn various computational methods for the determinant.
References
[Goc] M.S. Gockenbach, Finite-dimensional linear algebra, Discrete Mathematics and its applications, Taylor&Francis, 2011.
-
Congruent parallelograms are treated as identical. ↩
-
Strictly speaking, we have not verified that area is well-defined. For example, even if there are several ways to make a given parallelogram from the unit square through processes 1 and 2, we must verify that the area defined as above is the same. We leave this to intuition. ↩
댓글남기기