
Simplices
The simplices we will introduce first help provide intuitive understanding when developing homology theory.
Definition 1 For any natural number \(k\), suppose \(k+1\) points \(v_0,\ldots, v_k\in\mathbb{R}^d\) are given in general position. Then the \(k\)-simplex formed by these points is the smallest convex set containing the set \(\{v_0,\ldots, v_k\}\).
Here, saying that \(k+1\) vertices are in general position means that these points are not contained in any hyperplane of dimension less than \(k\). In other words, it can also be understood that the \(k\) vectors
\[v_1-v_0,\ldots, v_k-v_0\]are linearly independent. For example, a \(0\)-simplex is a point, a \(1\)-simplex is a line segment connecting two vertices, a \(2\)-simplex is a triangle connecting three points, and a \(3\)-simplex is a tetrahedron.

As shown in the figure above, the \(n\)-simplex formed by the \(n+1\) vertices
\[(1,0,\ldots, 0),\qquad\cdots,\qquad (0,0,\ldots,1)\]in \(\mathbb{R}^{n+1}\) is called the standard simplex. Naturally, these simplices themselves are not our primary interest; rather, we are interested in using them to compute invariants of manifolds. To do this, we need to define a \(\Delta\)-complex structure on manifolds. Let us consider the following simple and intuitive example.
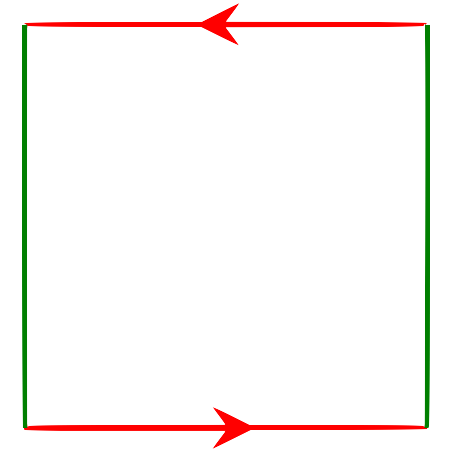
Example 2 An example we will often consider is the (2-dimensional) torus \(T^2\). By a simple definition, this is the product manifold \(S^1\times S^1\), but to intuitively see that this product manifold is a torus, consider the following figure.
In this figure, imagine gluing the lines of each color in the direction of the arrows “without twisting.” For instance, if we first glue the horizontal edges to form a cylinder, and then glue the bottom and top of the cylinder along the remaining edges, we obtain the following.
This is the quotient space obtained by giving the square the following equivalence relation
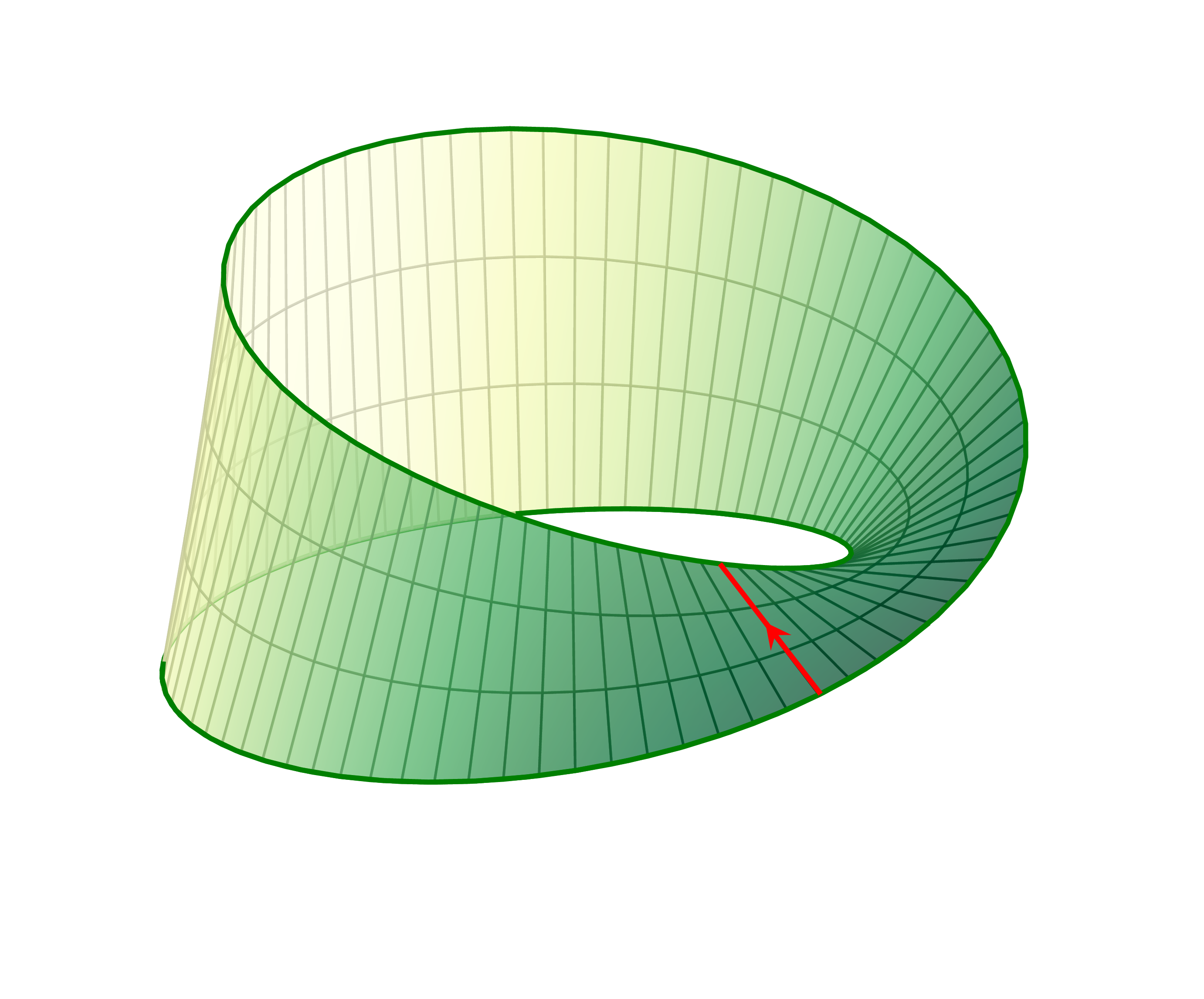
\[(x,0)\sim (x,1),\qquad (0,y)\sim(1,y)\]if the square was a point on the coordinate plane passing through the four points \((0,0),(0,1),(1,0),(1,1)\), and considering that \(S^1\) is obtained by giving the quotient topology to the interval \([0,1]\) on the vertical line by identifying \(0\) and \(1\), we see that this is the same as the definition \(T^2=S^1\times S^1\). On the other hand, considering the following quotient space where, with the same figure, we change the direction of one edge and glue only the horizontal edges
the space obtained this time is not a cylinder but a Möbius strip
In the example above, if we divide the squares drawn on the plane along their diagonals into two triangles, we can think of these squares as two \(2\)-simplices joined together, and by transferring this to the quotient space in the same way as above, we can understand the spaces in Example 2 as being constructed by joining simplices. As seen in this example, when gluing \(2\)-simplices, the orientation of edges (more generally, the orientation of \((n-1)\)-simplices when gluing \(n\)-simplices) is important, and this is determined by giving a total order among vertices. For instance, if we consider the ordering of vertices \(v_0,\ldots, v_k\) of a \(k\)-simplex according to the index order as the positive orientation, then applying an odd permutation to obtain \(v_1,v_0,v_2,\ldots,v_k\) gives the negative orientation. We denote a simplex with orientation given according to the index order as \([v_0,\ldots, v_k]\). Under this notation, whether we view a \((k-1)\)-simplex obtained by forgetting one vertex of a \(k\)-simplex as a face of the original \(k\)-simplex, or as the following \((k-1)\)-simplex
\[[v_0,\ldots,\hat{v}_i,\ldots, v_k]=[v_0,\ldots, v_{i-1},v_{i+1},\ldots, v_k]\]the orientation remains the same.
Definition 3 For a topological space \(X\), a \(\Delta\)-complex structure on it is a collection of functions \(\sigma_\alpha:\Delta^{n(\alpha)}\rightarrow X\) defined as follows.
- The restriction of \(\sigma_\alpha\) to \(\interior(\Delta^{n(\alpha)})\) is injective, and for any point \(x\in X\), there exists exactly one \(\alpha\) such that \(x\in \sigma_\alpha(\interior(\Delta^{n(\alpha)}))\).
- The restriction \(\sigma_\alpha\vert_{\Delta^{n(\alpha)-1}}:\Delta^{n(\alpha)-1}\rightarrow X\) obtained by restricting \(\sigma_\alpha\) to a face of \(\Delta^{n(\alpha)}\) also belongs to this collection of functions.
- \(A\subseteq X\) is open in \(X\) if and only if, for each \(\alpha\), \(\sigma_\alpha^{-1}(A)\) is open in \(\Delta^{n(\alpha)}\).
For instance, the standard simplex \(\Delta^2\) trivially has a \(\Delta\)-complex structure; explicitly, the functions giving this structure consist of
\[\operatorname{id}_{\Delta^2}:\Delta^2\rightarrow\Delta^2\]and three functions \(\sigma^1_1,\sigma^1_2,\sigma^1_3\) mapping the \(1\)-simplex \(\Delta^1\) to each edge, and three functions \(\sigma_1^0,\sigma_2^0,\sigma_3^0\) mapping the \(0\)-simplex \(\Delta^0\) to each vertex.
Example 4 For example, the 2-dimensional torus \(T^2\) can be represented as shown in the following figure

and this figure simultaneously gives \(T^2\) a \(\Delta\)-complex structure.
Simplicial Homology
We now define invariants of topological spaces using the \(\Delta\)-complex structure defined above. More specifically, this will be defined through groups formed by formal sums of simplices. However, there is a subtle problem to point out at this point, which is that for this to be an invariant of the topological space \(X\), it must not depend on the choice of \(\Delta\)-complex structure.
For example, when we subdivide the square in Example 2 more finely to create more 2-simplices as shown in the figure above, the newly created gray \(1\)-simplices must somehow cancel each other out. That is, when choosing a \(\Delta\)-complex, we must attach them with appropriately matched orientations, but when computing invariants, we must add them with reversed signs. With this in mind, the following calculation will be more intuitive.
Consider a topological space \(X\) with a given \(\Delta\)-complex structure, and let \(C^\Delta_k(X)\) be the free abelian group generated by \(k\)-simplices. That is,
\[C^\Delta_k(X)=\{\sigma_\alpha:\Delta^{n(\alpha)}\rightarrow X\text{ $k$-simplex}\mid n(\alpha)=k\}\cdot\mathbb{Z}\]Following the convention when dealing with abelian groups, we consider the operation of \(C^\Delta_k(X)\) to be addition. As we saw earlier, the boundary of a \(k\)-simplex \([v_0,\ldots, v_k]\) consists of the following \((k-1)\)-simplices
\[[v_1,v_2,\ldots, v_k],\quad[v_0,v_2,\ldots, v_k],\quad\cdots,[v_0,v_1,\ldots\hat{v}_i,\ldots,v_k],\quad\cdots,\quad[v_0,v_1,\ldots, v_{k-1}]\]If we think of the boundary of \([v_0,\ldots, v_k]\) as the sum of these, we obtain a function from \(C^\Delta_k(X)\) to \(\Delta_{k-1}(X)\). If we define the boundary map \(\partial_k\) not as a simple sum of these simplices, but by the following equation
\[\partial_k(\sigma_\alpha|_{[v_0,\ldots,v_k]})=\sum_{i=0}^n(-1)^i\sigma_\alpha|_{[v_0,\ldots, \hat{v}_i,\ldots,v_k]}\tag{1}\]then it is well known that \((C^\Delta_k(X),\partial_k)\) forms a chain complex. The signs on the right side of this equation are set, as pointed out above, so that simplices that meet inside \(X\) cancel each other out.
Proposition 5 \((C^\Delta_k(X),\partial_k)\) is a chain complex. ([Category Theory] §Abelian Categories, ⁋Definition 4)
Proof
For any \(\sigma_\alpha\in C^\Delta_k(X)\),
\[\partial_k(\sigma_\alpha|_{[v_0,\ldots,v_k]})=\sum_{i=0}^n(-1)^i\sigma_\alpha|_{[v_0,\ldots, \hat{v}_i,\ldots,v_k]}\]so
\[\partial_{k-1}\partial_k(\sigma_\alpha|_{[v_0,\ldots,v_k]})=\sum_{j < i}(-1)^{i+j}\sigma_\alpha|_{[v_0,\ldots, \hat{v}_j,\ldots\hat{v}_i,\ldots,v_k]}+\sum_{j > i}(-1)^{i+j-1}\sigma_\alpha|_{[v_0,\ldots, \hat{v}_i,\ldots\hat{v}_j,\ldots,v_k]}\]and therefore the first sum and second sum cancel each other out.
The \(n\)-th homology of the chain complex \((C^\Delta_k(X),\partial_k)\) obtained in this way is called the \(n\)-th simplicial homology and is denoted \(H_n^\Delta(X)\). ([Homological Algebra] §Homology, ⁋Definition 3)
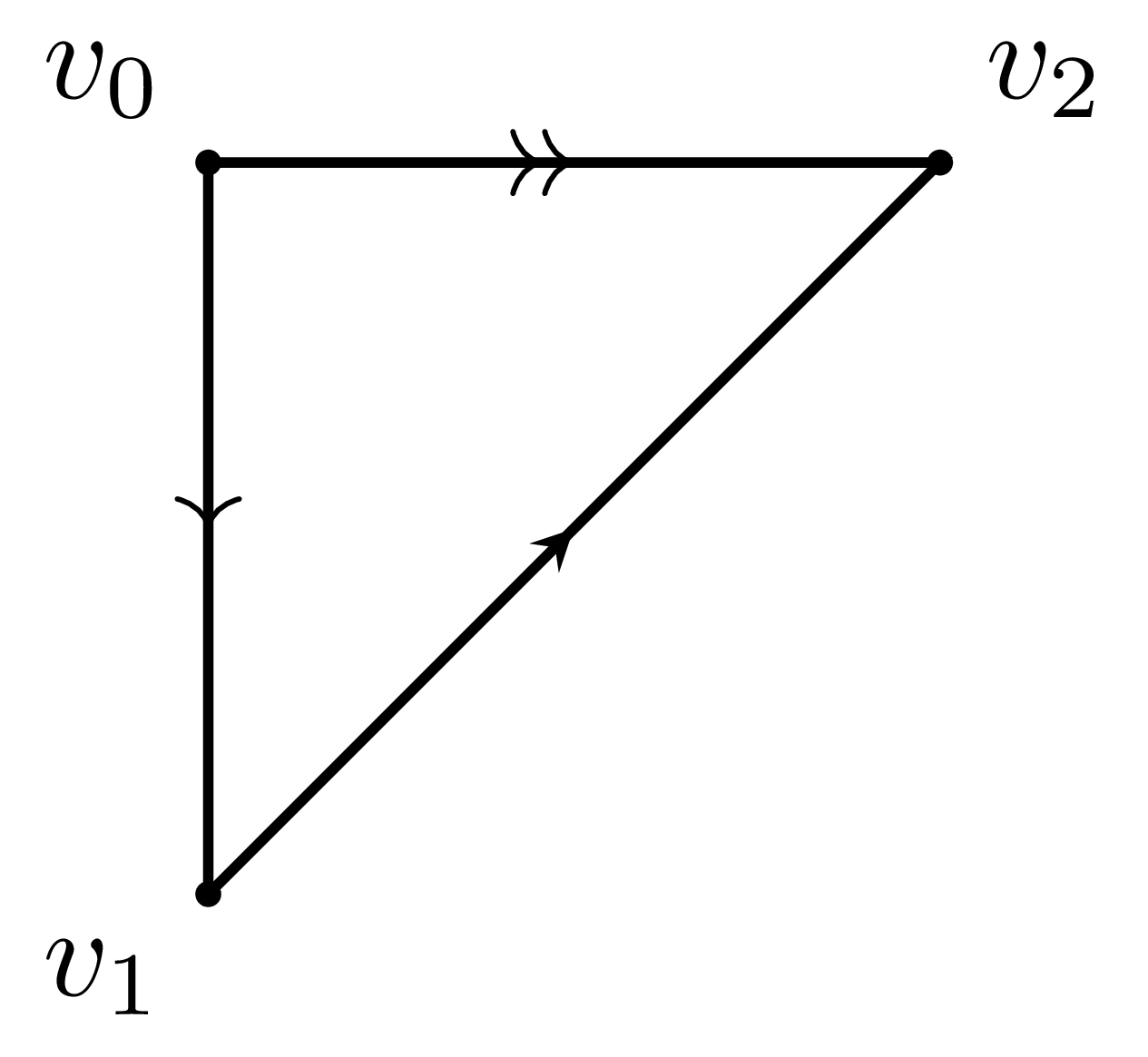
Example 6 Let us represent the 2-dimensional torus \(T^2\) as in Example 4 above, and denote the \(2\)-simplices as \(L\) and \(U\) in the order listed on the right, the \(1\)-simplices as \(a,b,c\), and the \(0\)-simplex as \(p\). Since the two \(1\)-simplices \(b,c\) already have orientations given, for them to be simplices, \(a\) must have the direction from the lower left to the upper right. Now, given the vertices \(v_0,v_1,v_2\) of \(U\) as shown in
we can write
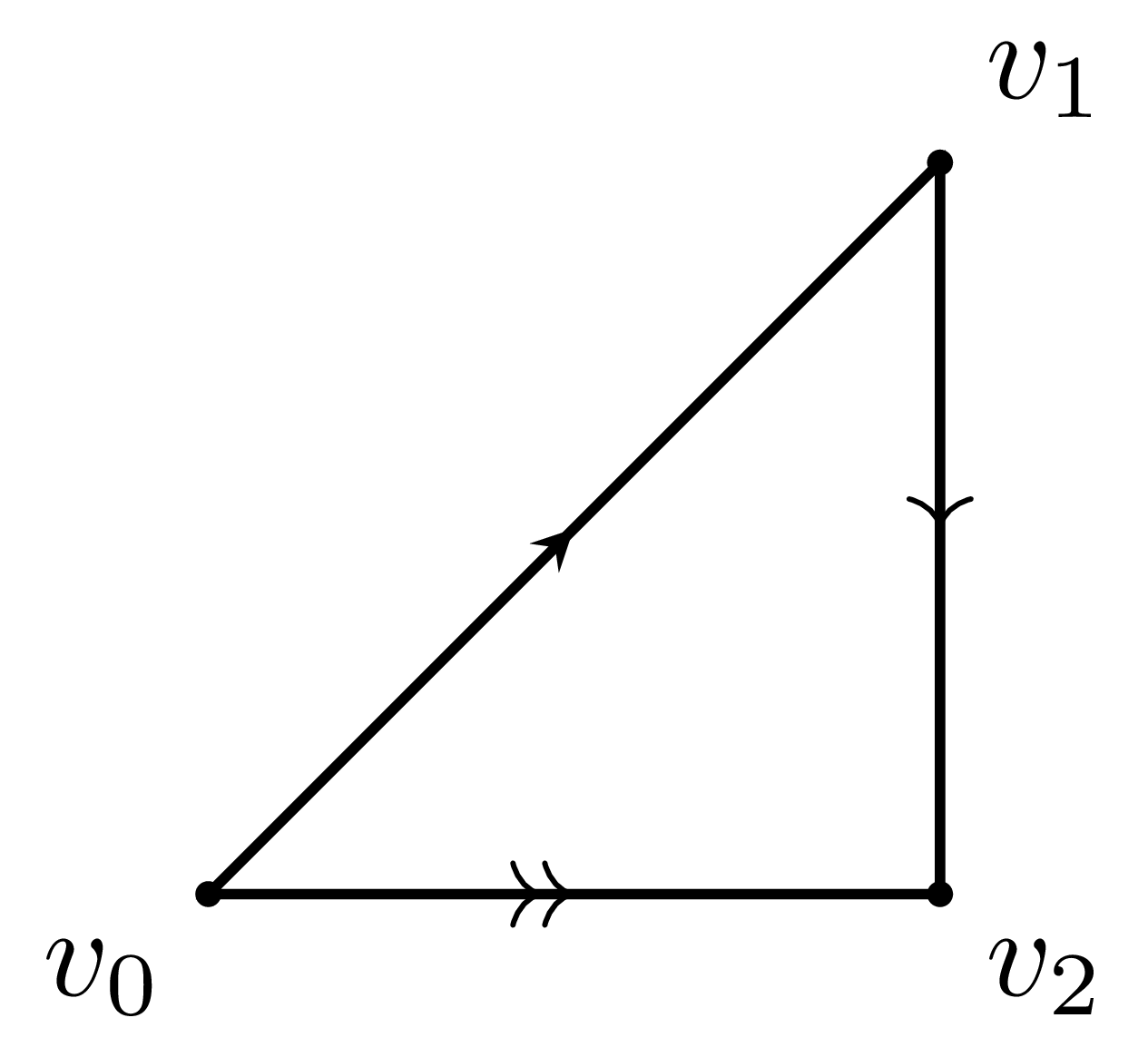
\[a=[v_0,v_2],\quad b=[v_1,v_2],\quad c=[v_0,v_1]\]Similarly, given the vertices \(v_0,v_1,v_2\) of \(L\) as shown in the following figure

we can consider for \(L\) that
\[a=[v_0,v_2],\quad b=[v_0,v_1],\quad c=[v_1,v_2]\]Now considering the boundary map \(\partial_2:C^\Delta_2(T^2)\rightarrow C^\Delta_1(T^2)\), we have
\[\begin{aligned}\partial_2(U)&=[v_1,v_2]-[v_0,v_2]+[v_0,v_1]=b-a+c,\\ \partial_2(L)&=[v_1,v_2]-[v_0,v_2]+[v_0,v_1]=c-a+b\end{aligned}\]Also, considering \(\partial_1:C^\Delta_1(T^2)\rightarrow C^\Delta_0(T^2)\), since all these vertices correspond to the same point \(p\) in \(T^2\),
\[\partial_1(a)=\partial_1(b)=\partial_1(c)=p-p=0\]and therefore in the following complex
\[\cdots\overset{\partial_3}{\longrightarrow}C^\Delta_2(T^2)=\langle L,U\rangle\overset{\partial_2}{\longrightarrow}C^\Delta_1(T^2)=\langle a,b,c\rangle\overset{\partial_1}{\longrightarrow}C^\Delta_0(T^2)=\langle p\rangle\overset{\partial_0}{\longrightarrow}0\]we have
\[\ker\partial_2=\langle L-U\rangle,\qquad\ker\partial_1=C^\Delta_1(T^2),\qquad\ker\partial_0=C^\Delta_0(T^2)\]and
\[\im\partial_3=0,\qquad\im\partial_2=\langle a-b-c\rangle,\qquad \im\partial_1=0\]so
\[H_2^\Delta(T^2)=\ker\partial_2/\im\partial_3\cong\mathbb{Z},\quad H_1^\Delta(T^2)=\ker\partial_1/\im\partial_2\cong \mathbb{Z}\oplus\mathbb{Z},\quad H_0^\Delta(T^2)=\ker\partial_0/\im\partial_1\cong\mathbb{Z}\]and the remaining homologies are all \(0\).
Meanwhile, in [Homological Algebra] §Homology, ⁋Definition 3, we called the elements of \(Z_n(C)=\ker\partial_n\) \(n\)-cycles and the elements of \(B_n(C)=\im\partial_{n+1}\) \(n\)-boundaries, and now their names are intuitively clear. That is, in this case, boundary maps actually compute the boundary of simplices, and \(n\)-cycles are those whose values cancel when computing boundaries in this way—for example, in Example 6, the closed curves formed by \(a,b\) (and \(c\)) in the original space \(T^2\)—while \(n\)-boundaries are literally \(n\)-simplices that appear as boundaries of some \((n+1)\)-simplex.
Singular Homology
The simplicial homology defined above has intuitively clear meaning, but its limitation is clear in that to compute the homology of an arbitrary topological space \(X\), we must give it a \(\Delta\)-complex structure. Even if \(X\) is a topological manifold, it is well known that if its dimension is \(4\) or higher, it may be impossible to give \(X\) a \(\Delta\)-complex structure.
Therefore, we relax this condition and define a new homology.
Definition 7 A singular \(k\)-simplex defined on \(X\) is a continuous function \(\sigma:\Delta^k\rightarrow X\).
Unlike the \(\Delta\)-complex structure defined in the previous text, singular \(k\)-simplices do not need to maintain the shape of a \(k\)-simplex in \(X\) at all. For example, a constant map sending all points of \(\Delta^k\) to a single point is also a singular \(k\)-simplex.
Now let \(C_k(X)\) be the free abelian group generated by all singular \(k\)-simplices, and define \(\partial_k:C_k(X)\rightarrow C_{k-1}(X)\) in the same way as equation (1) above. Then we can verify that \((C_k(X), \partial_k)\) forms a chain complex in exactly the same way as Proposition 5, and the homologies in this case are called singular homology and denoted \(H_n(X)\).
Example 8 Calculating singular homology from the definition is not a good idea, but for our intuition, let us do some (non-rigorous) calculations.
By definition, a singular \(0\)-simplex on any topological space \(X\) is a continuous function from \(\Delta^0\) to \(X\). Since \(\Delta^0\) is just a single point, \(C_0(X)\) is the free abelian group generated by the points of \(X\). Similarly, if we identify \(\Delta^1\) with the interval \(I=[0,1]\), then \(C_1(X)\) is just the free abelian group generated by paths in \(X\), where we also allow the constant path \([0,1]\rightarrow X\)—and for this reason we call it a singular \(1\)-simplex. Likewise, after continuous deformation, \(C_2(X)\) would be the free abelian group generated by disks contained in \(X\).
Then the boundary of a path \(\sigma:[0,1]\rightarrow X\) is given by \(\partial_1\sigma=\sigma(1)-\sigma(0)\) according to equation (1) above, and from this we know
\[Z_1(X)=\ker\partial_1=\left\{\sigma:[0,1]\rightarrow X\mid \sigma(1)=\sigma(0)\right\}\]Intuitively, \(Z_1(X)\) can be thought of as a subgroup generated by closed curves in \(X\). Similarly, if we try to give geometric meaning to \(B_1(X)=\im\partial_2\), it means closed curves in \(X\) that appear as boundaries of some disk, and therefore the first homology
\[H_1(X)=\frac{Z_1(X)}{B_1(X)}\]examines how many closed curves in \(X\) do not appear as boundaries of disks. For example, the first homology of the subset
\[D^2=\left\{(x,y)\in \mathbb{R}^2\mid x^2+y^2\leq 1\right\}\]of \(\mathbb{R}^2\) is \(0\). This is because for any closed curve in \(D^2\), there trivially exists a way to fill its interior.
On the other hand, the first homology of the space \(D^2\setminus {(0,0)}\) is not \(0\). For example, considering the following closed curve
there is no way to (continuously) fill its interior to make it a disk. However, similarly, for the punctured space
\[D^3\setminus \left\{(0,0,0)\right\}=\left\{(x,y,z)\in \mathbb{R}^3\mid 0< x^2+y^2+z^2\leq 1\right\}\]the first homology of this space is \(0\), because even if a closed curve “containing the hole”
\[S^1=\left\{(x,y,0)\in \mathbb{R}^3\mid x^2+y^2=1\right\}\]is given, we can view it as the boundary of a disk as shown below
Instead, the second homology of this space will not be \(0\).
There are some minor gaps in this calculation. For example, a constant map sending all points of \(\Delta^1\) to a fixed \(x\in X\) is by definition a singular \(1\)-complex, but when we claim that any closed curve in \(D^2\) can be filled, we did not consider paths of this (constant) form. However, what we need to show is ultimately that by applying \(\partial\) to an appropriate singular \(2\)-complex \(\Delta^2 \rightarrow X\), this singular \(1\)-complex appears, so we can just think of a \(2\)-complex sending all points of \(\Delta^2\) to a fixed \(x\in X\), and then consider the boundary of this complex, which gives exactly the complex \(\Delta^1 \rightarrow X\) we want. Generalizing this, for any \(n\), a singular \(n\)-complex sending all points of \(\Delta^n\) to a fixed \(x\in X\) is the boundary of a singular \((n+1)\)-complex sending all points of \(\Delta^{n+1}\) to a fixed \(x\in X\). In other words, the constant map always becomes the identity in \(H_n(X)\).
Gaps of this kind can be resolved with a little attention as above. In fact, for any space \(X\) that can be given a \(\Delta\)-complex structure, it can be shown that singular homology \(H_n(X)\) and simplicial homology \(H_n^\Delta(X)\) are always equal. Roughly speaking, singular \(\Delta^k \rightarrow X\) like constant maps become boundaries of similarly singular \(\Delta^{k+1}\rightarrow X\), so when comparing the two quotients
\[H_n^\Delta(X)=\frac{\ker\partial_n^\Delta}{\im\partial_{n+1}^\Delta},\qquad H_n(X)=\frac{\ker\partial_n}{\im\partial_{n+1}}\]as much as \(\ker \partial_n\) becomes larger than \(\ker\partial_n^\Delta\) by allowing singular \(\Delta^k \rightarrow X\), \(\im\partial_n\) also becomes larger accordingly, resulting in these two quotients being equal.
A more fundamental problem is that this calculation relies entirely on our geometric intuition. To compute the homology of complex spaces, we need to study more general properties of homology.
Properties of Homology
Proposition 9 When representing a topological space \(X\) as a disjoint union of path-components \(X=\coprod X_i\), the following isomorphism
\[H_n(X)\cong \bigoplus_{i\in I} H_n(X_i)\]holds.
Proof
First, since the continuous image of a path-connected space \(\Delta^k\) is path-connected, the images of singular simplices are entirely contained in the \(X_i\)’s. From this we know \(C_n(X)\cong \bigoplus_{i\in I} C_n(X_i)\). For the same reason, \(\partial\) also preserves this decomposition, and since direct sum preserves the kernel and image of such maps, we obtain the desired result.
Therefore, computing the homology of any topological space reduces to the problem of computing the homology of any path-connected space. However, this is still not an easy problem. We cannot do the calculation in general, but for \(n=0\) there is geometric meaning.
Proposition 10 For a non-empty path-connected space \(X\), \(H_0(X)\cong \mathbb{Z}\).
Proof
First, since \(\partial_0=0\),
\[H_0(X)=\ker\partial_0/\im\partial_1=C_0/\im\partial_1\]To construct an isomorphism \(H_0(X)\rightarrow\mathbb{Z}\), define a homomorphism \(\varepsilon:C_0(X)\rightarrow\mathbb{Z}\) by the equation
\[\varepsilon\left(\sum n_i\sigma_i\right)=\sum_i n_i\]Then since \(X\) is nonempty, \(\varepsilon\) is surjective. Therefore, by the first isomorphism theorem, it suffices to show \(\ker\varepsilon=\im\partial_1\). At this point, the inclusion \(\ker\varepsilon \supseteq \im\partial_1\) is trivial by the definition of \(\partial_1\), so we only need to show the reverse inclusion. Assume \(\varepsilon\left(\sum n_i\sigma_i\right)=0\), and for each \(i\), let \(x_i\) be the images of the \(0\)-simplices \(\sigma_i\). Then from the assumption that \(X\) is path-connected, we can choose some point \(x\) and paths from \(x\) to each \(x_i\), and these determine one \(1\)-simplex according to their direction. Calling these \(\tau_i\), we have \(\partial \tau_i=\sigma_i-\sigma\), and therefore
\[\partial\left(\sum_i n_i\tau_i\right)=\sum n_i\sigma_i-\sum n_i \sigma=0\]from which we obtain the desired result.
The proof became somewhat long for rigor, but the essential idea is that for any two points in a path-connected space \(X\), they can be connected by a path, and viewing this path as a \(1\)-simplex, these two points become the boundary of the \(1\)-simplex, so with respect to \(B_0(X)=\im\partial_1\), we can regard these two points as the same.
Conversely, there are cases where we can compute the homology for all \(n\), which is when \(X\) is a point. In this case, regardless of the value of \(k\), the singular \(k\)-simplex \(\sigma_k:\Delta^k \rightarrow X\) is uniquely determined (i.e., as a constant function), and considering equation (1), \(\partial_k\) is \(0\) when \(k\) is odd and maps \(\sigma_k\) to \(\sigma_{k-1}\) when \(k\) is even. That is, the following chain complex
\[\cdots\rightarrow \mathbb{Z} \overset{0}{\longrightarrow}\mathbb{Z}\overset{\approx}{\longrightarrow} \mathbb{Z}\overset{0}{\longrightarrow}\mathbb{Z}\rightarrow0\]is the chain complex of singular simplices, and therefore we obtain the following.
Proposition 11 For a one-point space \(X\), \(H_0(X)\cong \mathbb{Z}\) and for all \(k>0\), \(H_k(X)\cong 0\).
However, of course, the most important property might be functoriality. But we already know that in the category \(\Ch_{\geq 0}(\Ab)\) of chain complexes of \(\Ab\), for each \(n\), \(H_n:\Ch_{\geq 0}(\Ab)\rightarrow \Ab\) computing the \(n\)-th homology is a functor. Therefore, to show that the composition
\[\Top \rightarrow \Ch_{\geq 0}(\Ab)\rightarrow \Ab\]is a functor, it suffices to show that \(\Top \rightarrow \Ch_{\geq 0}(\Ab)\) is a functor.
Proposition 12 \(\Top\rightarrow\Ch_{\geq 0}(\Ab)\) is a functor.
Proof
That is, we need to show that for any continuous function \(f:X\rightarrow Y\), there exists a chain map \(C_\bullet(f):C_\bullet(X)\rightarrow C_\bullet(Y)\). Naturally, \(C_\bullet(f)\) can be defined by the equation
\[C_\bullet(f):\sigma\mapsto f\circ\sigma\]and the key is to show that this is a chain map. That this is a chain map is easily proven since for any \(\sigma:\Delta^n \rightarrow X\),
\[\begin{aligned}(C_\bullet(f)\circ\partial^X_n)(\sigma)&=C_\bullet(f)\left(\sum_{i=0}^n(-1)^i\sigma\vert_{[v_0,\ldots,\hat{v}_i,\ldots,v_n]}\right)=\sum_{i=0}^n(-1)^iC_\bullet(f)(\sigma\vert_{[v_0,\ldots,\hat{v}_i,\ldots,v_n]})\\&=\sum_{i=0}^n(-1)^i f\circ(\sigma\vert_{[v_0,\ldots,\hat{v}_i,\ldots,v_n]})=\sum_{i=0}^n(-1)^i (f\circ\sigma)\vert_{[v_0,\ldots,\hat{v}_i,\ldots,v_n]}\\&=\partial_n^Y(f\circ\sigma)=(\partial_n^Y\circ C_\bullet(f))(\sigma)\end{aligned}\]Finally, we define the following.
Definition 13 If \(H_n(X)\cong H_n(Y)\) holds for all \(n\), then the two spaces \(X,Y\) are said to be homologous.
References
[Hat] A. Hatcher, Algebraic Topology. Cambridge University Press, 2022.
댓글남기기